
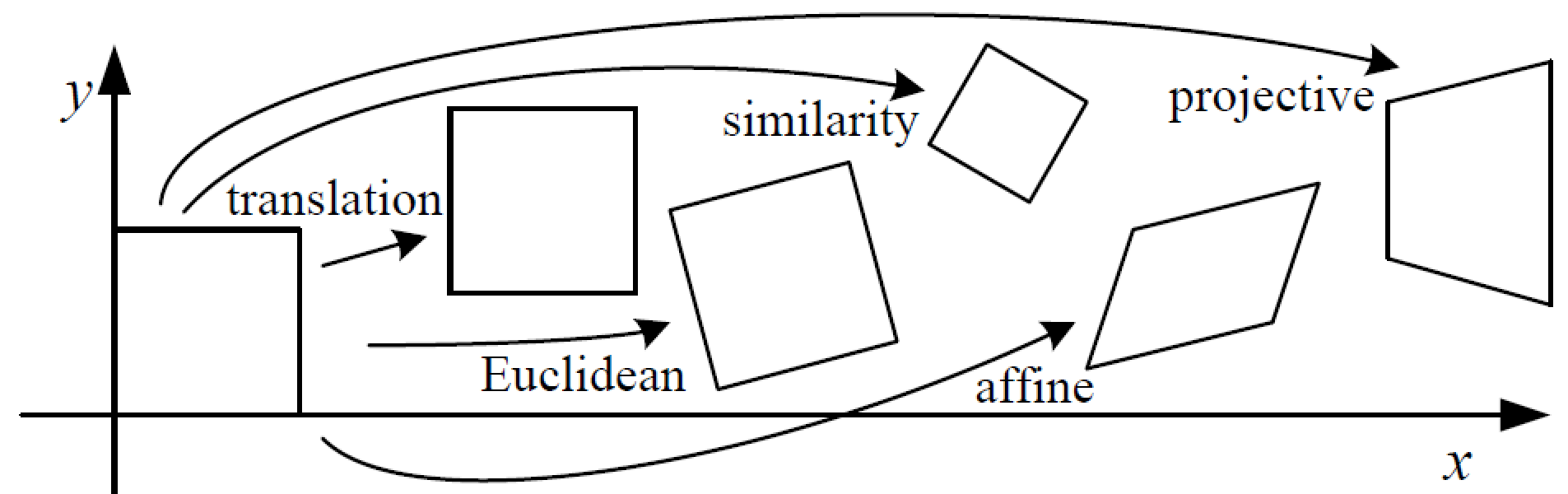
二维平面中,图像的几何变换有等距、相似、仿射、投影等,如下所示:
1 图象几何变换
1.1 等距变换
等距变换 (Isometric Transformation),是一种二维的刚体变换,可理解为旋转和平移的组合
$quad begin{bmatrix} x' \ y' \ 1 end{bmatrix} = begin{bmatrix} cos theta & -sin theta & t_x \ sin theta & cos theta & t_y \ 0&0&1 end{bmatrix} begin{bmatrix} x \ y \ 1end{bmatrix} =begin{bmatrix} R_{2 times 2} & T_{2 times 1} \ 0_{1 times 2} & 1_{1 times 1} end{bmatrix} begin{bmatrix} x \ y \1 end{bmatrix}$
其中, $R=begin{bmatrix} cos theta &-sintheta \ sin theta & cos theta end{bmatrix}$ 为旋转矩阵, $T=begin{bmatrix}t_x \ t_y end{bmatrix}$ 为平移矩阵
想象一个无限大的光滑平面上,放一张极薄的图像照片,让它只能在平面内做旋转和平移运动,则这样的运动就是等距变换
-- 配图
1.2 相似变换
相似变换 (Similarity Transformation),是一个等距变换和各向均匀缩放的组合
$quad begin{bmatrix} x' \ y' \ 1 end{bmatrix} = begin{bmatrix} s cos theta & -ssin theta & t_x \ s sin theta & s cos theta & t_y \ 0&0&1 end{bmatrix} begin{bmatrix} x \ y \ 1end{bmatrix} = begin{bmatrix} sR_{2 times 2} & T_{2 times 1} \ 0_{1 times 2} & 1_{1 times 1} end{bmatrix} begin{bmatrix} x \ y \1 end{bmatrix}$,其中 $s$ 为缩放系数
想象无限大光滑平面内的一张图片,在旋转和平移的过程中,其大小也会均匀缩放(各个方向),则这样的变换就是相似变换
-- 配图
1.3 仿射变换
1.3.1 定义
仿射变换(Affine Transformation),是一个非奇异线性变变换 (矩阵乘法) 和 平移变换 (向量加法) 的组合
矩阵表达式为 $quad begin{bmatrix} x' \ y' \ 1 end{bmatrix} = begin{bmatrix} a_{11} & a_{12} & t_x \ a_{21} & a_{22} & t_y \ 0 & 0 & 1 end{bmatrix} begin{bmatrix} x \ y \ 1 end{bmatrix} =begin{bmatrix} A_{2 times 2} & T_{2 times 1} \ 0_{1 times 2} & 1_{1 times 1} end{bmatrix} begin{bmatrix} x \ y \1 end{bmatrix}$
其中,当 $A = begin{bmatrix} a_{11} & a_{12} \ a_{21} & a_{22} end{bmatrix}$ 是非奇异时,称 $A$ 为仿射矩阵
1.3.2 分解
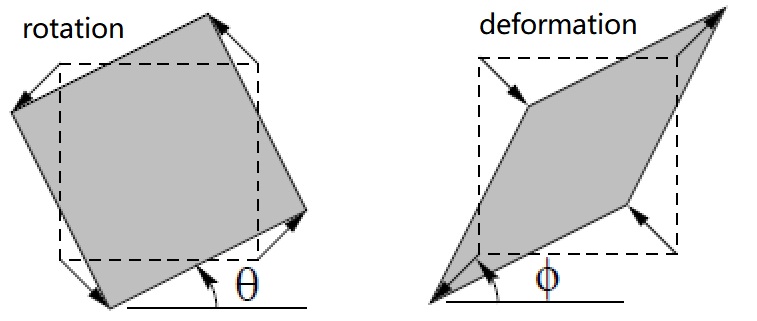
仿射矩阵 $A$ 可分解为:旋转和各向 (正交) 非均匀缩放
$quad A = R(theta) R(-phi) D R(phi)$,其中 $D = begin{bmatrix} lambda_1 & 0 \ 0 & lambda_2 end{bmatrix}$是一个对角矩阵
首先,旋转角度 $phi$;然后在 $x$ 和 $y$ 方向上 (其中 $xperp y$) 分别缩放 $lambda_1$ 和 $lambda_2$;再旋转角度 $-phi$,也即回转 $phi$;最后旋转角度 $theta$
想象无限大光滑平面内的一张图片,在旋转和平移的过程中,其大小在正交方向上非均匀缩放,则这样的变换就是仿射变换
1.3.3 不变量
仿射变换的过程中,有三个重要的不变量,分别是:平行线,平行线段长度比,面积比
2 OpenCV 函数
2.1 相似变换的矩阵
对于相似变换,有 4 个未知数 ($s, theta, t_x, t_y$),对应 OpenCV 中的 getRotationMatrix2D() 函数
Mat getRotationMatrix2D ( Point2f center, // 原图像中的旋转中心点 double angle, // 旋转角度(正值代表逆时针旋转) double scale // 均匀缩放系数 )
该函数可得到如下矩阵:
$begin{bmatrix} alpha & beta & (1- alpha ) cdot texttt{center.x} - beta cdot texttt{center.y} \ - beta & alpha & beta cdot texttt{center.x} + (1- alpha ) cdot texttt{center.y} end{bmatrix}$
其中, $alpha=scale cdot cos angle$
$beta=scale cdot sin angle$
2.2 仿射变换的矩阵
仿射变换有 6 个未知数 ($phi, theta, lambda_1, lambda_2, t_x, t_y$),需列 6 组方程,而一组对应特征点 $(x,y)$ -> $(x′,y′)$ 可构造 2 个方程,因此,求解 6 个未知数,需要 3 组对应特征点
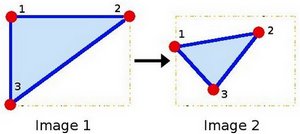
OpenCV 中 getAffineTransform() 可求解 2x3 矩阵 $begin{bmatrix} a_{11} & a_{12} & t_{x} \ a_{21} & a_{22} & t_y end{bmatrix}$
Mat getAffineTransform ( const Point2f src[], // 原图像的三角顶点坐标 const Point2f dst[] // 目标图像的三角顶点坐标 )
其代码实现比较简单,先构建方程组,再利用 solve() 求解 $Ax=b$
Mat getAffineTransform(const Point2f src[], const Point2f dst[]) { Mat M(2, 3, CV_64F), X(6, 1, CV_64F, M.ptr()); double a[6 * 6], b[6]; Mat A(6, 6, CV_64F, a), B(6, 1, CV_64F, b); for (int i = 0; i < 3; i++) { int j = i * 12; int k = i * 12 + 6; a[j] = a[k + 3] = src[i].x; a[j + 1] = a[k + 4] = src[i].y; a[j + 2] = a[k + 5] = 1; a[j + 3] = a[j + 4] = a[j + 5] = 0; a[k] = a[k + 1] = a[k + 2] = 0; b[i * 2] = dst[i].x; b[i * 2 + 1] = dst[i].y; } solve(A, B, X); return M; }
2.3 仿射变换的图象
已知仿射变换的 $A_{2 times 2}$ 和 $T_{2 times 1}$ ,将任意图像代入 warpAffine() ,便可得到仿射变换后的目标图像
void warpAffine( InputArray src, // 输入图象 OutputArray dst, // 输出图像(大小为 dsize,类型同 src) InputArray M, // 2x3 矩阵 Size dsize, // 输出图像的大小 int flags = INTER_LINEAR, int borderMode = BORDER_CONSTANT, const Scalar& borderValue = Scalar() )
3 代码示例
首先构造3组三角顶点坐标,代入 getAffineTransform() 得到仿射变换的矩阵;再用 getRotationMatrix2D() 构造相似变换的矩阵;然后,warpAffine() 求解经过相似变换和仿射变换的图像;最后,显示对比变换后的目标图像
#include "opencv2/core.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui.hpp" using namespace cv; int main() { // 1) read image Mat src = imread("horse.jpg"); // 2) triangle vertices Point2f srcTri[3]; srcTri[0] = Point2f(0.f, 0.f); srcTri[1] = Point2f(src.cols - 1.f, 0.f); srcTri[2] = Point2f(0.f, src.rows - 1.f); Point2f dstTri[3]; dstTri[0] = Point2f(0.f, src.rows * 0.33f); dstTri[1] = Point2f(src.cols * 0.85f, src.rows * 0.25f); dstTri[2] = Point2f(src.cols * 0.15f, src.rows * 0.7f); // 3.1) getAffineTransform Mat warp_mat1 = getAffineTransform(srcTri, dstTri);
// 3.2) getRotationMatrix2D Mat warp_mat2 = getRotationMatrix2D(Point2f(0.5*src.cols, 0.5*src.rows), 45, 0.5); // 4) warpAffine image Mat dst1,dst2; warpAffine(src, dst1, warp_mat1, Size(src.cols, src.rows)); warpAffine(src, dst2, warp_mat2, Size(src.cols, src.rows)); // 5) show image imshow("image", src); imshow("warp affine 1", dst1); imshow("warp affine 2", dst2); waitKey(0); }
检测结果对比如下:



参考资料
《Computer Vision: Algorithms and Applications》 Chapter 2 Image Formation
《Multiple View Geometry in Computer Vision》 2.4 A hierarchy of transformations
OpenCV Tutorials / Image Processing (imgproc module) / Affine Transformations
OpenCV-Python Tutorials / Image Processing in OpenCV / Geometric Transformations of Images
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!



 客服
客服


