绪论
本文将介绍一个完全用Verilog HDL手写的AMBA片上系统,项目的主题是设计一个基于AMBA总线的流水灯控制系统,
项目中所有数字电路逻辑都将通过Verilog进行RTL设计,不会调用成熟IP核,
然后利用Vivado平台对RTL模型进行仿真、综合与布线,最后在FPGA开发板上进行板级验证。

AMBA是ARM公司推出的一种总线架构,目前已非常成熟,在行业内得到广泛的应用,极具实际应用价值,
本项目涉及了AMBA架构中的AHB协议&APB协议,
系统包括AHB总线、APB总线两个部分,
整个系统的基本架构如下图所示:
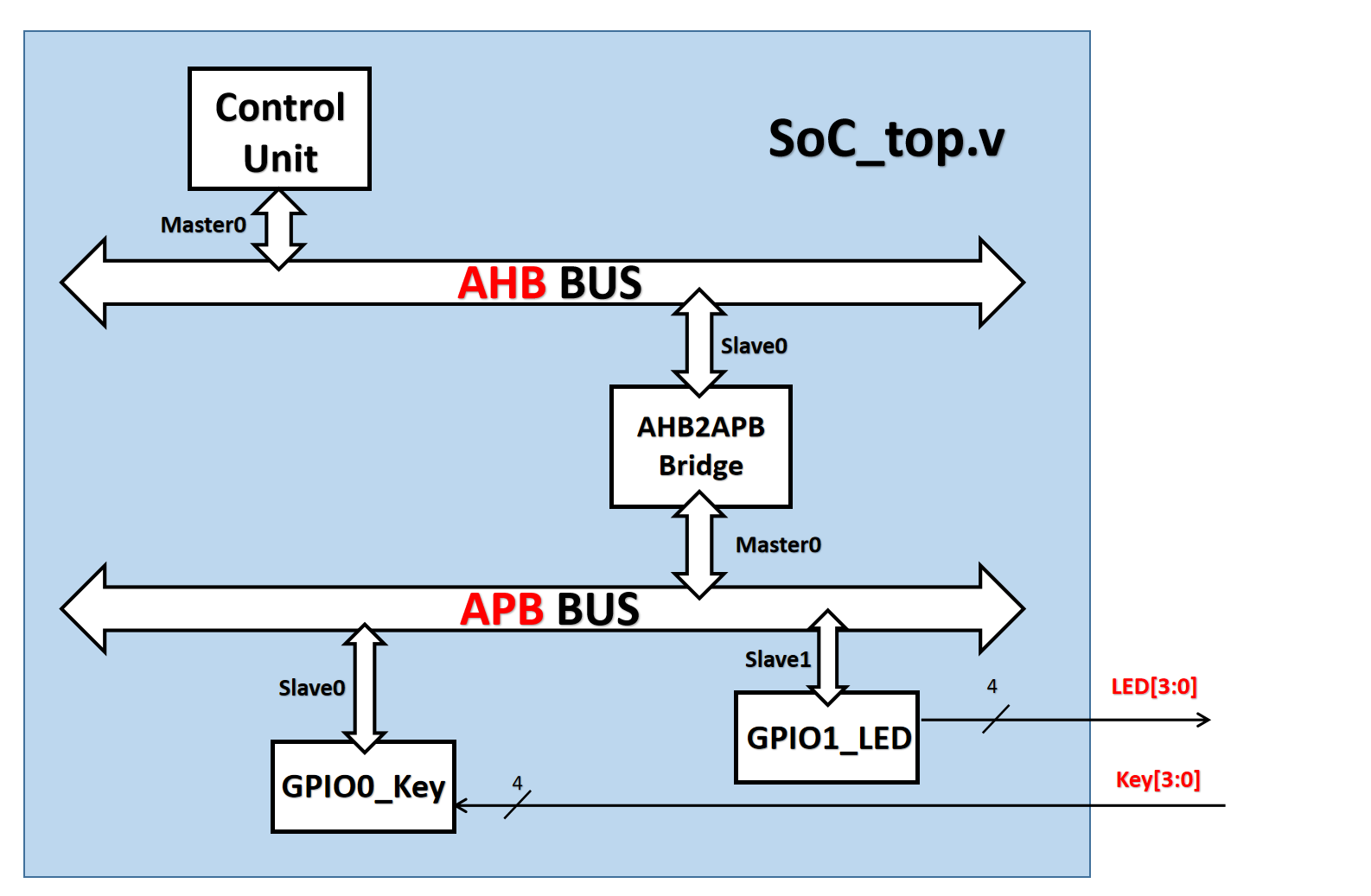
总的来说,由AHB总线上的主机————流水灯控制单元(Control Unit),发出控制信号,
进而对APB总线上的从机GPIO模块进行配置,实现对流水灯的流动方式的控制,
本项目是一个完整的AMBA总线系统,包括总线、主机、从机以及外设,
在各章节中,将会介绍如何利用Verilog语言对以下模块进行RTL设计:
1. Control Unit模块
2. AHB2APB Bridge模块
3. GPIO模块
希望本项目能给对AMBA总线架构感兴趣的朋友们一些启发与帮助。
下面,先简要介绍一下AHB/APB总线的基本特性和数据传输时序:
AHB总线协议简介:
AHB总线,全称为Advanced High performance Bus,属于AMBA2.0规范中的一部分,
在SoC片上系统中,AHB主要用于一些高性能模块之间的连接(如CPU、DMA、DSP等),
主要的特性包括:单时钟边沿操作、支持突发传输、支持多个主控制器、可配置总线宽度(32位~128位)、支持字节、半字、字传输。
一个典型的AHB总线系统通常以下图所示的方式进行多主机多从机互联:
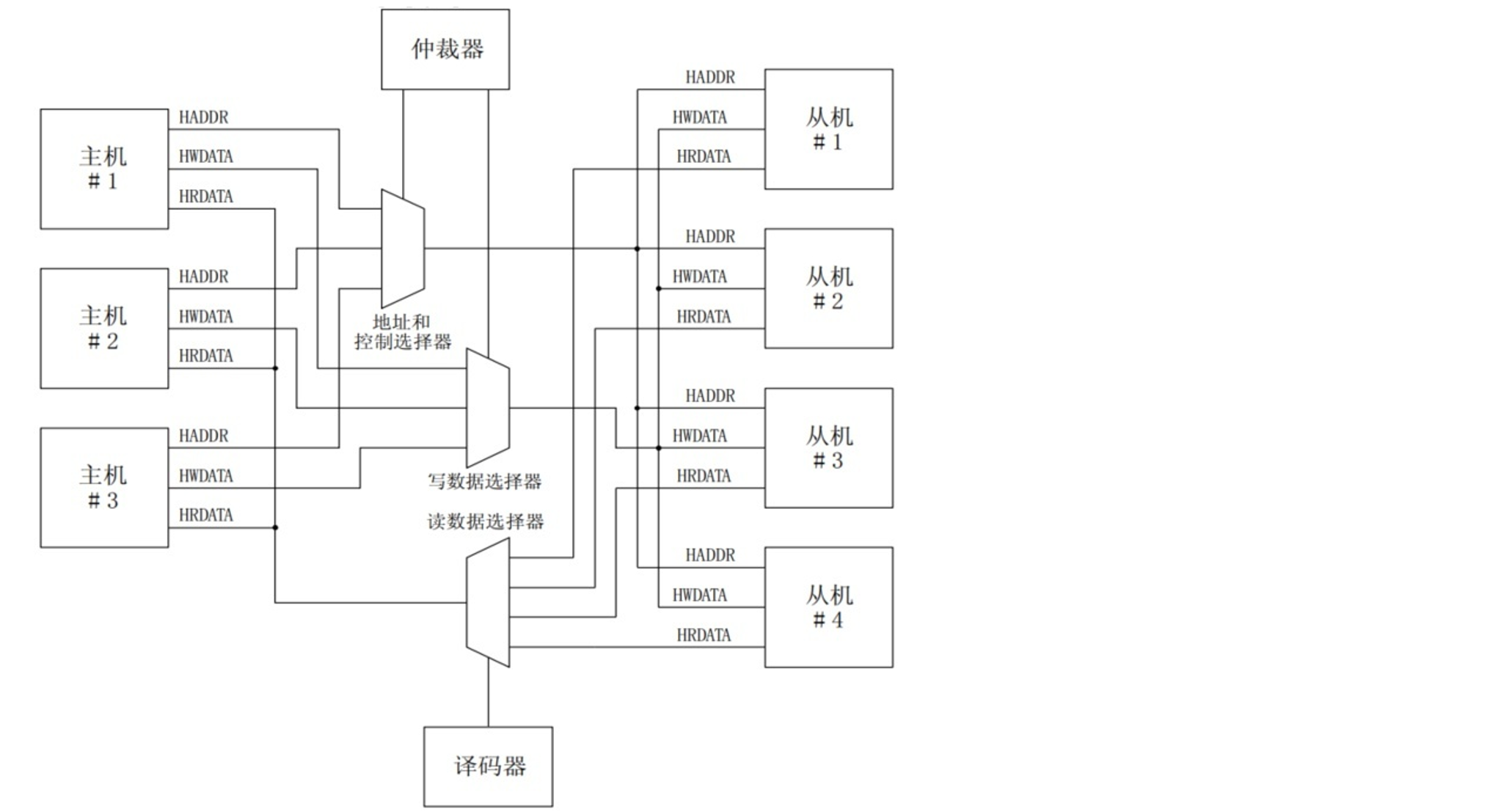
可以看出,Master(主机)这边的地址信号HADDR和数据信号HWDATA都是广播的,通过仲裁器arbiter给出的hselx来选择对应的从机,
而Slave(从机)这边的数据,则是通过Decoder来解码给主机这边的。
当HSELx选中对应的从设备后,就可以开始传输了,一个无等待传输的时序如下所示:
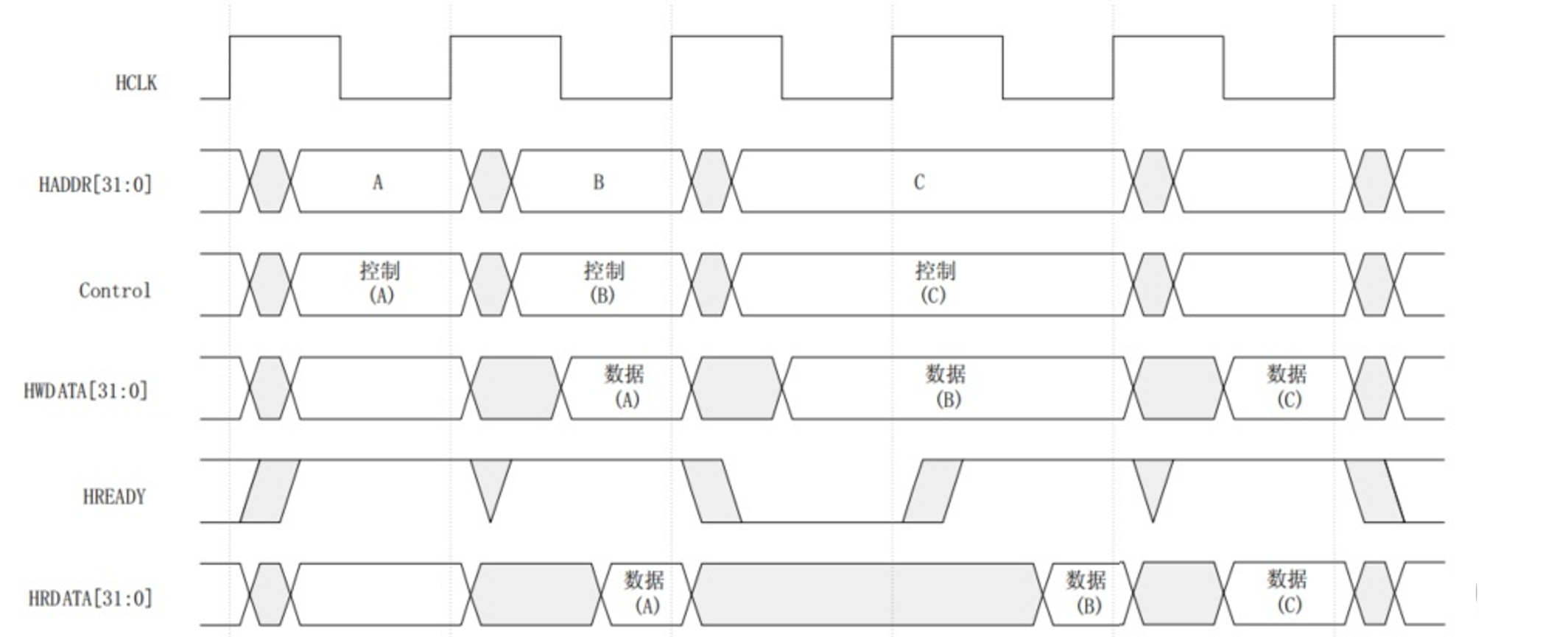
图中可以看出,AHB总线具有流水线特性,地址周期和数据周期交替进行
APB总线协议简介:
APB,全称为Advanced Peripheral Bus,主要用于低带宽的周边外设之间的连接,例如UART、1284等,
APB总线架构不像AHB支持多个Master,在APB里面唯一的Master就是APB桥。
APB总线特性包括:
-
两个时钟周期传输(非流水线,不同于AHB)
-
无需等待周期和回应信号
-
控制逻辑简单
-
只有四个控制信号
下图展示了APB总线上的一次标准的数据传输时序:
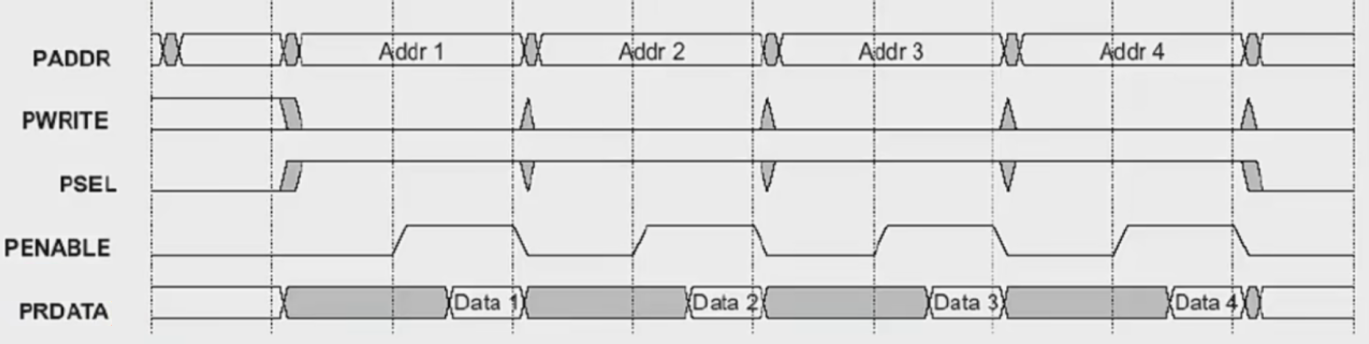
其他有关APB总线的介绍,将在下文AHB2APB Bridge模块的设计章节中涉及
1. 系统架构与功能
系统架构:
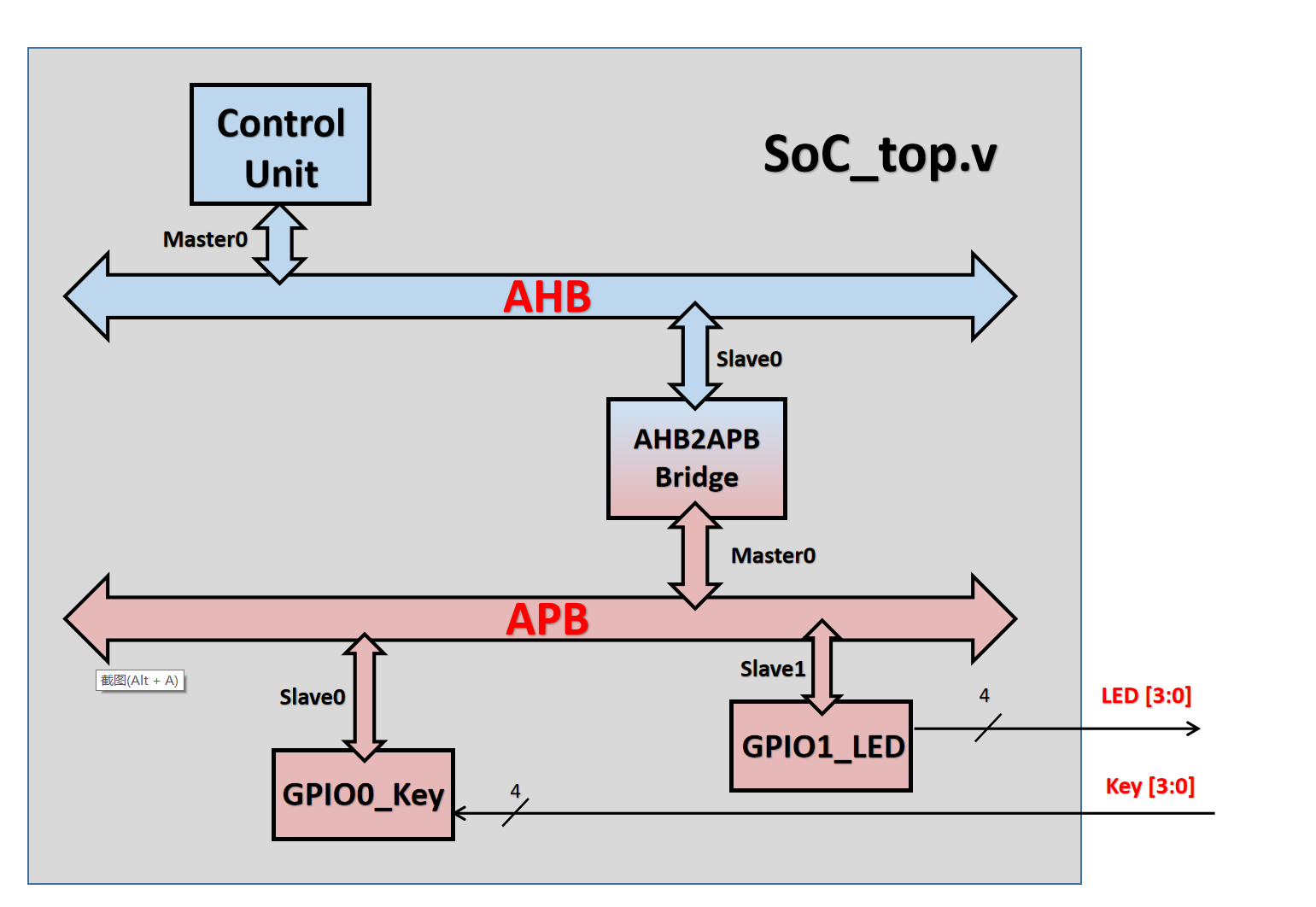
本项目的系统架构框图上图所示,
其中,蓝色部分为AHB总线以及AHB上的主机从机,粉色部分则是APB总线以及APB上的主机从机,
下面介绍一下总线上各个模块的功能和定义:
-
流水灯控制单元(Contro Unit)
在AHB总线上,流水灯控制单元作为Master,
控制单元发出的AHB总线信号将经过AHB2APB Bridge,成为APB信号,
APB信号会对GPIO模块的寄存器进行配置,配置后的GPIO就可以对开发板上的按键状态进行观测,并对LED灯进行控制 -
AHB转APB桥(AHB2APB Bridge)
AHB2APB Bridge作为逻辑连接器,一方面是在AHB的Slave,另一方面也是APB的Master(APB总线有且只有这唯一1个Master)。
弄清这个概念,就可以定义模块的输入输出的端口,以及需要满足的时序。
由于AHB总线具有流水线特性,而APB没有,这就需要让AHB在合适的时候拉低HREADYout添加一个等待周期 -
通用输入输出模块(General-purpose Input/Output)
GPIO模块作为APB总线上的Slave,具有一个APB Slave接口,
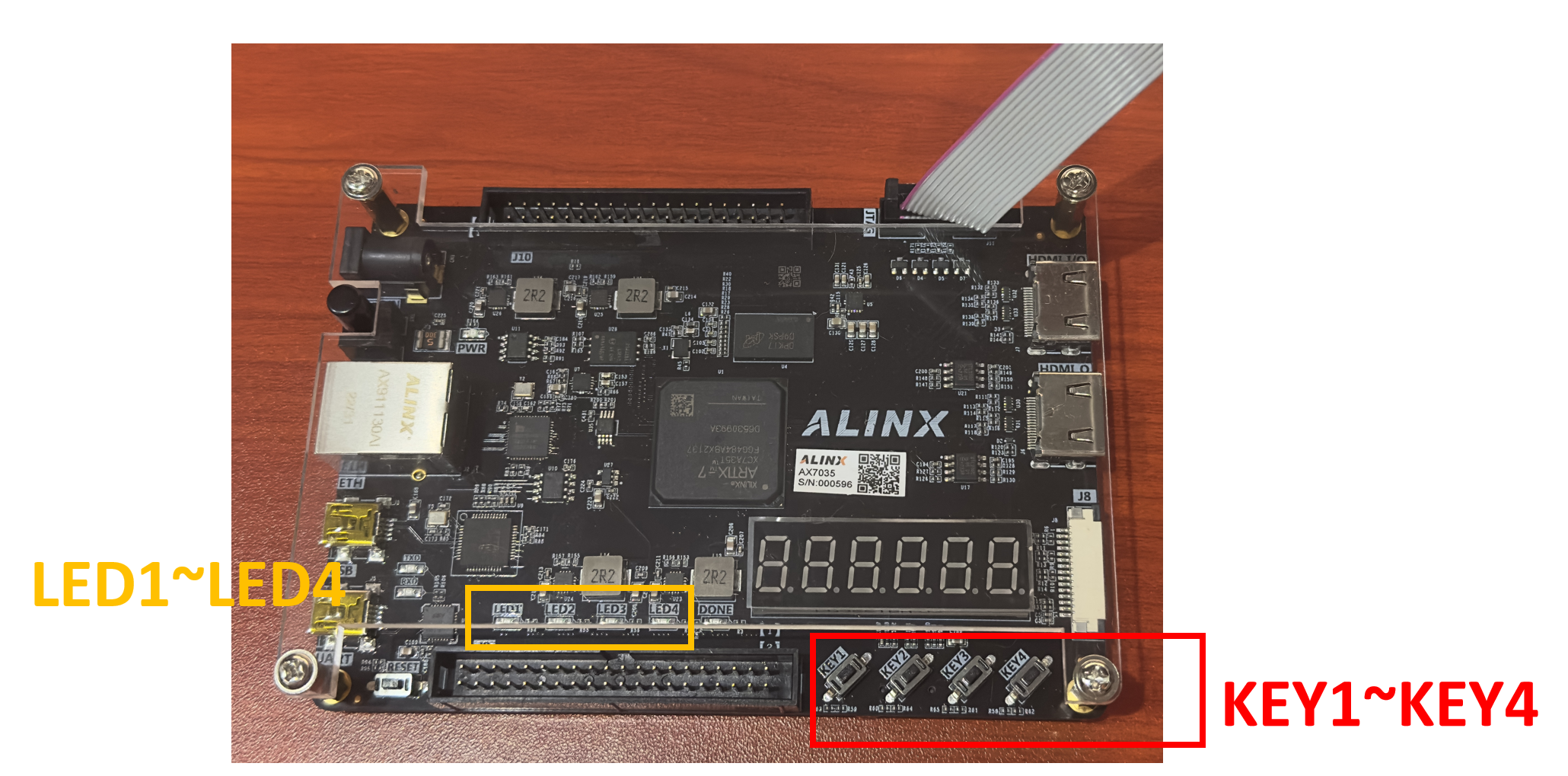
除此之外,也会直接连接到FPGA开发板的按键外设和LED灯外设:
GPIO模块的输入为Key[3:0],用于观测开发板上的按键状态,
GPIO模块的输出为LED[3:0],用于控制开发板上LED灯的亮灭。
由于本项目用到的FPGA开发板的LED外设为共阳极,因此当引脚输出低电平时,对应LED将被点亮;反之,LED将会熄灭。
项目中涉及到的外设在开发板上的位置如下图所示:
流水灯系统工作模式:
-
初始静止模式:所有LED灯熄灭,
上电后/按下reset后,进入该状态,所有LED灯熄灭,
此时LED_mode = 4'b0000(LED_mode为Control Unit中流水灯工作模式寄存器,用以控制LED灯闪烁的逻辑) -
工作模式0:普通流水灯模式
初始静止模式同时按下KEY0~KEY3进入工作模式0,
或在工作模式0~3下,按下FPGA开发板上按键KEY1进入工作模式0,
此时LED_mode = 4'b0001,
在工作模式0下,开发板上的LED灯将按照下图所示的方式,做有规律的周期性流动: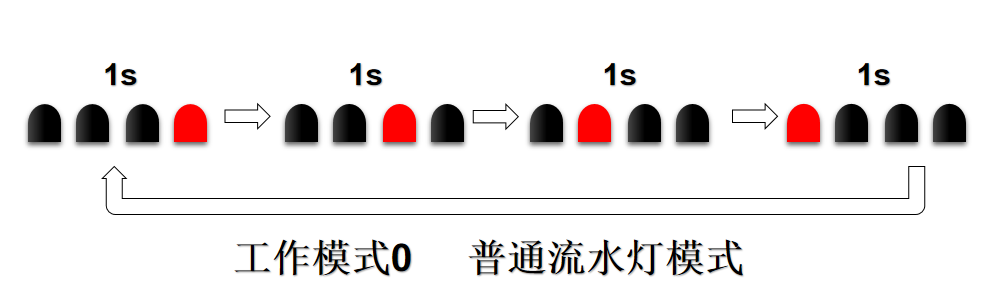
LED0~LED4将依次闪烁,每个灯闪烁时长为1s,循环周期为4s -
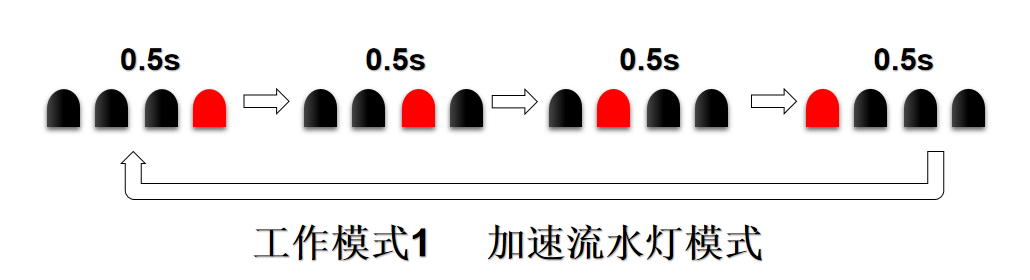
工作模式1:加速流水灯模式
在工作模式0~3下,按下FPGA开发板上按键KEY2,进入该工作状态,
此时LED_mode = 4'b0010,
在工作模式1下,LED灯将加速流动,每个灯闪烁时长为0.5s,循环周期为2s:
!
-
工作模式2:心跳模式
在工作模式0~3下,按下FPGA开发板上按键KEY3,进入该工作状态,
此时LED_mode = 4'b0100,
该模式下LED等将模仿心跳的节奏进行闪烁(详见最后一章中FPGA运行视频) -
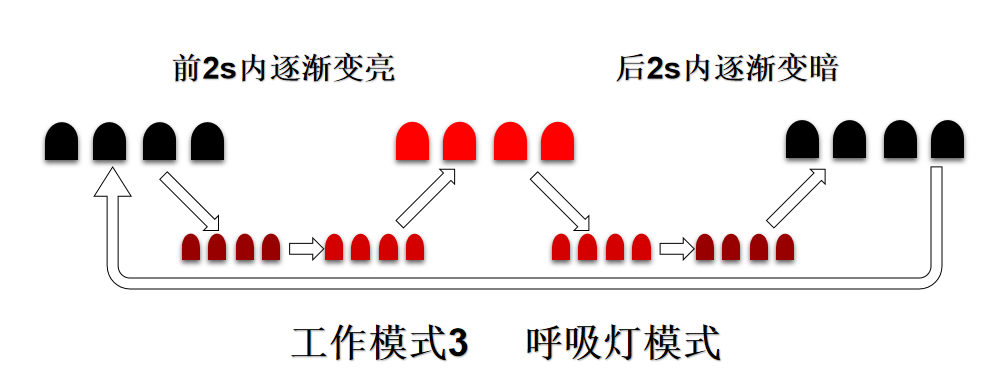
工作模式3:呼吸灯模式
在工作模式0~3下,按下FPGA开发板上按键KEY4,进入该工作状态,
该模式下LED将周期性进行逐渐由亮到暗再到亮的变化(周期为4s,其中前2s由暗变量,后2由亮变暗),
此时LED_mode = 4'b1000,
由于FPGA开发板上的LED灯亮度无法直接配置,
该模式是通过调节LED灯的占空比来实现的,占空比越高,小灯的平均功率越大,我们人眼看到的亮度也就越高
2. AHB2APB Bridge模块设计
首先介绍AHB2APB Bridge模块的设计方法,
该模块是AHB与APB总线之间的桥梁,负责两种协议信号的相互转换,
AHB2APB Bridge的模块框图和信号定义如下:
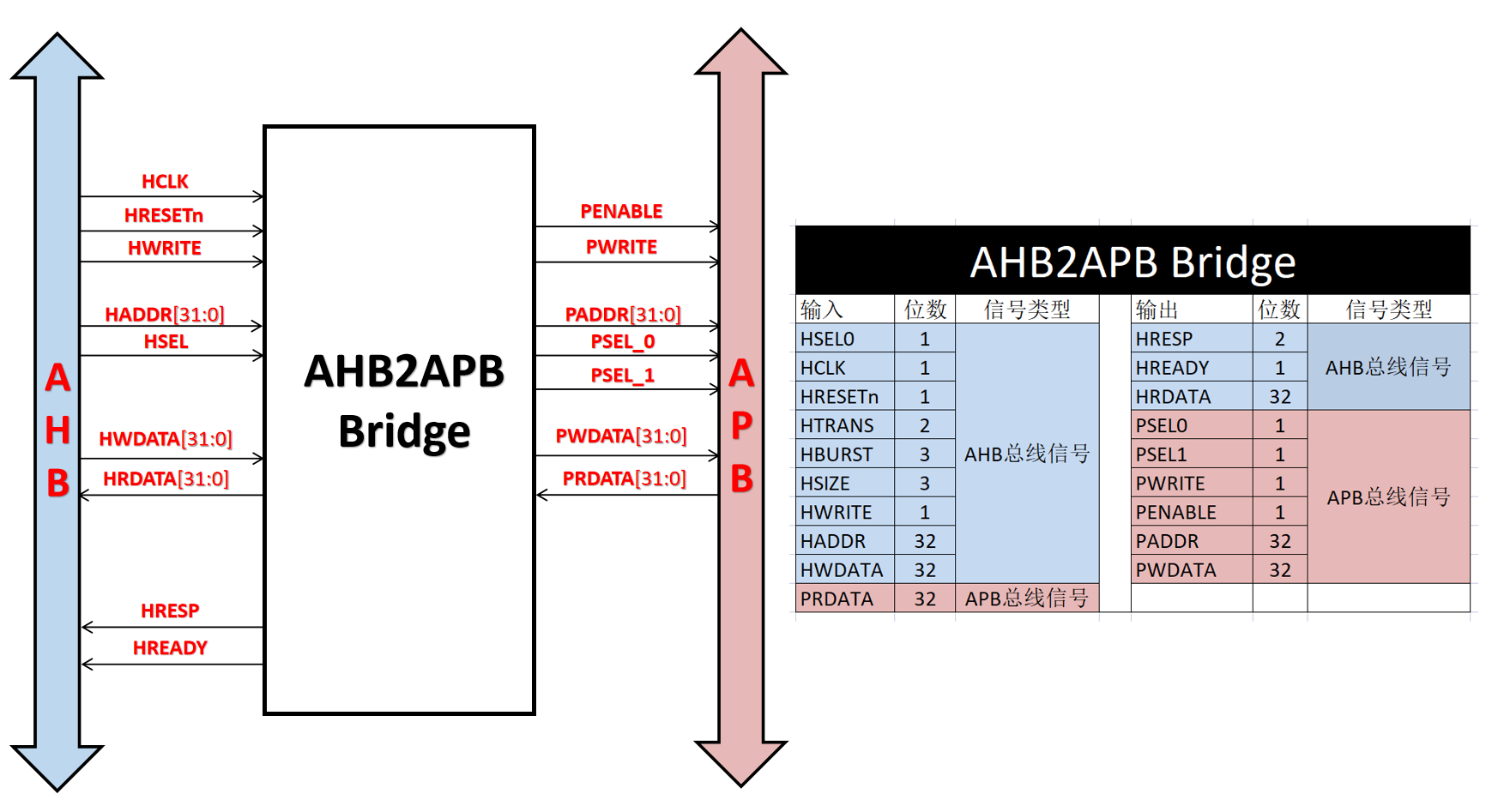
AHB2APB Bridge既是AHB总线上的一个Slave,也作为APB总线上唯一的Master,
其任务是将来自于AHB总线上的信号转化为APB信号,实现AHB系统和APB的互联,
那么如何实现一个可以完成上述功能的Bridge模块呢?
答案是通过一个有限状态机(FSM,Finite State Machine)来进行控制,
看看一次典型的AHB到APB信号转换时序图(以Read为例):

在T1-T2期间,Bridge作为AHB总线上的Slave被HADDR选中,
在T2-T4两个时钟周期内,Bridge将AHB的HADDR上的地址Addr1放在APB总线的PADDR上,
其中T2-T3,PENABLE尚未被拉高,且HREADY会被Bridge拉低,因为APB的传输速度是低于AHB的,需要AHB总线上的Master进行等待,
而T3-T4,PENABLE被Bridge使能,数据信息被放上PRDATA并且由Bridge转交给HRDATA,
我们将T1-T2,T2-T3,T3-T4这个周期分别称为IDLE,SETUP和ENABLE,
于是我们得到AHB2APB Bridge的状态机转换示意图:

注意:在T2-T4传输Data1后,APB总线又在T4-T6两个周期内完成了Data2的传输,
这两次传输之间并没有经历IDLE状态,这表明当AHB总线上仍然有传输任务时,ENABLE状态结束后会直接再次跳往SETUP状态以准备下一个数据的传输,
AHB2APB Bridge模块完整RTL如下:
module AHB2APB_bridge #(
//HRANS Parameters
parameter IDLE = 2'b00 ,
parameter BUSY = 2'b01 ,
parameter SEQ = 2'b10 ,
parameter NONSEQ = 2'b11 ,
//HRSP Parameters
parameter OKAY = 2'b00 ,
parameter ERROR = 2'b01 ,
parameter SPLIT = 2'b10 ,
parameter RETRY = 2'b11 ,
//bridge_state Parameters
parameter BRIDGE_IDLE = 2'b00,
parameter BRIDGE_SETUP = 2'b01,
parameter BRIDGE_ENABLE = 2'b10,
//ADDR Parameters
parameter ADDR_GPIO_0 = 32'h0000_0000,
parameter ADDR_GPIO_1 = 32'h0000_8000
) (
//------------ AHB ------------
//input
input iHCLK,
input iHRESETn,
input iHSEL,
input [1:0] iHTRANS,
input [3:0] iHSIZE ,
input [2:0] iHBURST,
input iHWRITE,
input [31:0] iHWDATA,
input [31:0] iHADDR ,
//output
output oHREADY,
output [1:0] oHRESP ,
output [31:0] oHRDATA,
//------------ APB ------------
//input
input [31:0] iPRDATA,
//output
output oPSEL0,
output oPSEL1,
output oPWRITE,
output oPENABLE,
output [31:0] oPADDR,
output [31:0] oPWDATA
);
/*————————————————————————————————————————————————————————————————————————*
/ AHB Signal Register
*————————————————————————————————————————————————————————————————————————*/
reg iHWRITE_r ;
reg [31:0] iHADDR_r ;
reg [31:0] iHWDATA_r ;
always@( posedge iHCLK) begin
if(!iHRESETn) begin
iHWRITE_r <= 1'b0;
iHADDR_r <= 32'b0;
iHWDATA_r <= 32'b0;
end
else if( iHSEL && (bridge_state == BRIDGE_IDLE || bridge_state == BRIDGE_ENABLE))begin
iHWRITE_r <= iHWRITE; // ahb reg change when bridge_state is going to change:
iHADDR_r <= iHADDR ; // from IDLE to SETUP
iHWDATA_r <= iHWDATA; // from ENABLE to SETUP
end
end
/*————————————————————————————————————————————————————————————————————————*
/ Bridge FSM
*————————————————————————————————————————————————————————————————————————*/
reg [1:0] bridge_state;
always @(posedge iHCLK ) begin
if (!iHRESETn) begin
bridge_state <= BRIDGE_IDLE;
end else begin
case ( bridge_state )
// IDLE
BRIDGE_IDLE: begin
if(iHSEL) begin
bridge_state <= BRIDGE_SETUP;
end
else begin
bridge_state <= BRIDGE_IDLE;
end
end
// SETUP
BRIDGE_SETUP: begin
bridge_state <= BRIDGE_ENABLE;
end
// ENABLE
BRIDGE_ENABLE: begin
if(iHSEL) begin
bridge_state <= BRIDGE_SETUP;
end
else begin
bridge_state <= BRIDGE_IDLE;
end
end
//DEFAULT
default: bridge_state <= BRIDGE_IDLE;
endcase
end
end
/*————————————————————————————————————————————————————————————————————————*
/ AHB Slave Output
*————————————————————————————————————————————————————————————————————————*/
assign oHREADY = ( bridge_state == BRIDGE_SETUP ) ? 1'b0 : 1'b1;
assign oHRESP = OKAY ;
assign oHRDATA = iPRDATA;
/*————————————————————————————————————————————————————————————————————————*
/ APB Master Output
*————————————————————————————————————————————————————————————————————————*/
assign oPSEL0 = ( iHADDR_r == ADDR_GPIO_0) ? 1'b1 : 1'b0;
assign oPSEL1 = ( iHADDR_r == ADDR_GPIO_1) ? 1'b1 : 1'b0;
assign oPWRITE = iHWRITE_r ;
assign oPENABLE = ( bridge_state == BRIDGE_ENABLE ) ? 1'b1 : 1'b0;
assign oPADDR = iHADDR_r;
assign oPWDATA = iHWDATA_r;
endmodule
3. GPIO模块设计
GPIO(General Purpose I/O),是一种用于对器件的引脚做观测或控制的外设,
在STM32、ZYNQ等开发中经常被使用到,相信大家并不陌生,
而在本项目中,我们将尝试自己用Verilog语言,设计一个具有基本功能的GPIO外设,
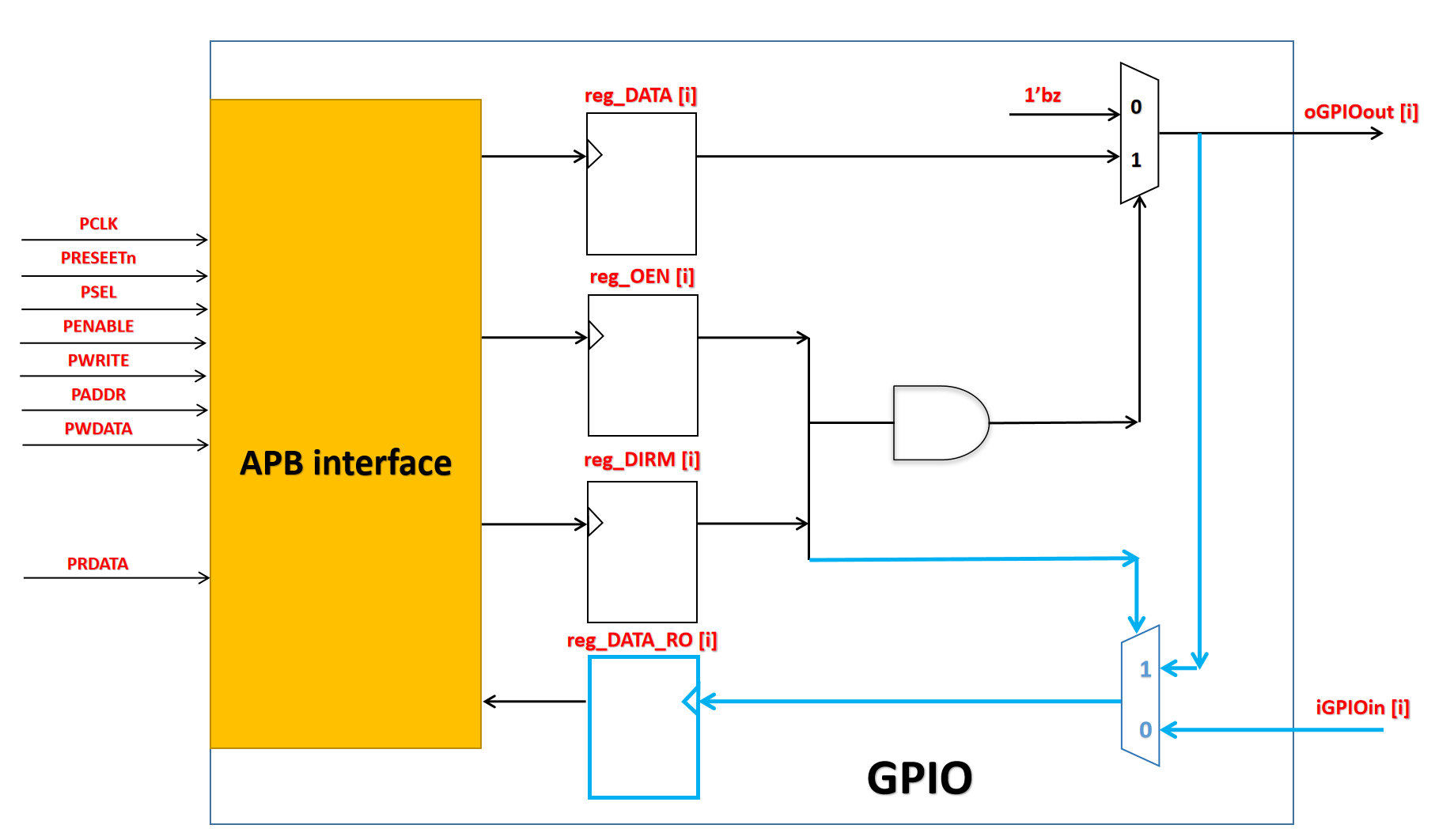
该模块具有一个APB Slave接口,
GPIO模块会被挂在APB总线上,实现流水灯控制系统和开发板的外设(LED灯&按键)的交互,
模块的信号定义如下表:
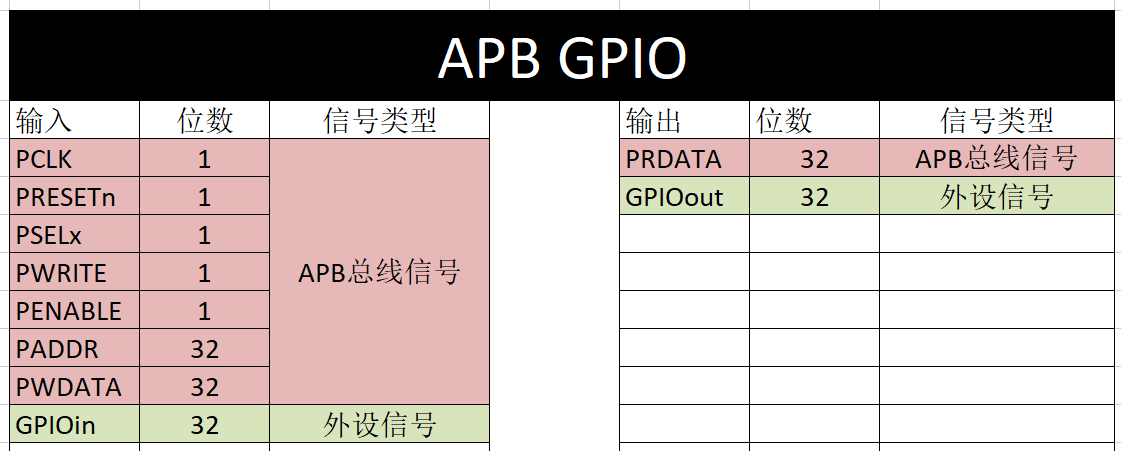
其中oGPIOout[3]连接开发板上LED4引脚,oGPIOout[2]连接LED3引脚,oGPIOout[1]连接LED2引脚,oGPIOout[0]连接LED1引脚,
iGPIOin[3:0]也是按照该顺序,依次连接开发板上的4个按键:KEY4,KEY3,KEY2,KEY1。
GPIO模块的功能实现,主要依靠四个32位寄存器:1.DATA_RO寄存器 2.DATA寄存器 3. DIRM寄存器 4. OEN寄存器
主机通过读配置写这些寄存器,就可以实现对外设的操作,
下面分析这四个寄存器:
DATA_RO:
用来观测GPIO引脚状态,若引脚被配置成输出模式,则该寄存器会反映驱动该引脚的电平的状态。
DATA_RO是一个只读寄存器,对该寄存器的写操作是无效的
DATA:
当GPIO某一引脚被配置为输出模式时,用来控制该引脚的输出状态
DIRM:
用来配置GPIO各个引脚的方向(做输入or做输出),
当DIRMP[x]==0,第x位引脚为输入引脚,其输出功能被disable
OEN:
当GPIO某一引脚被配置为输出模式时,用来使能该引脚的输出功能,
当OEN[x]==0时,第x位引脚的输出功能被disable
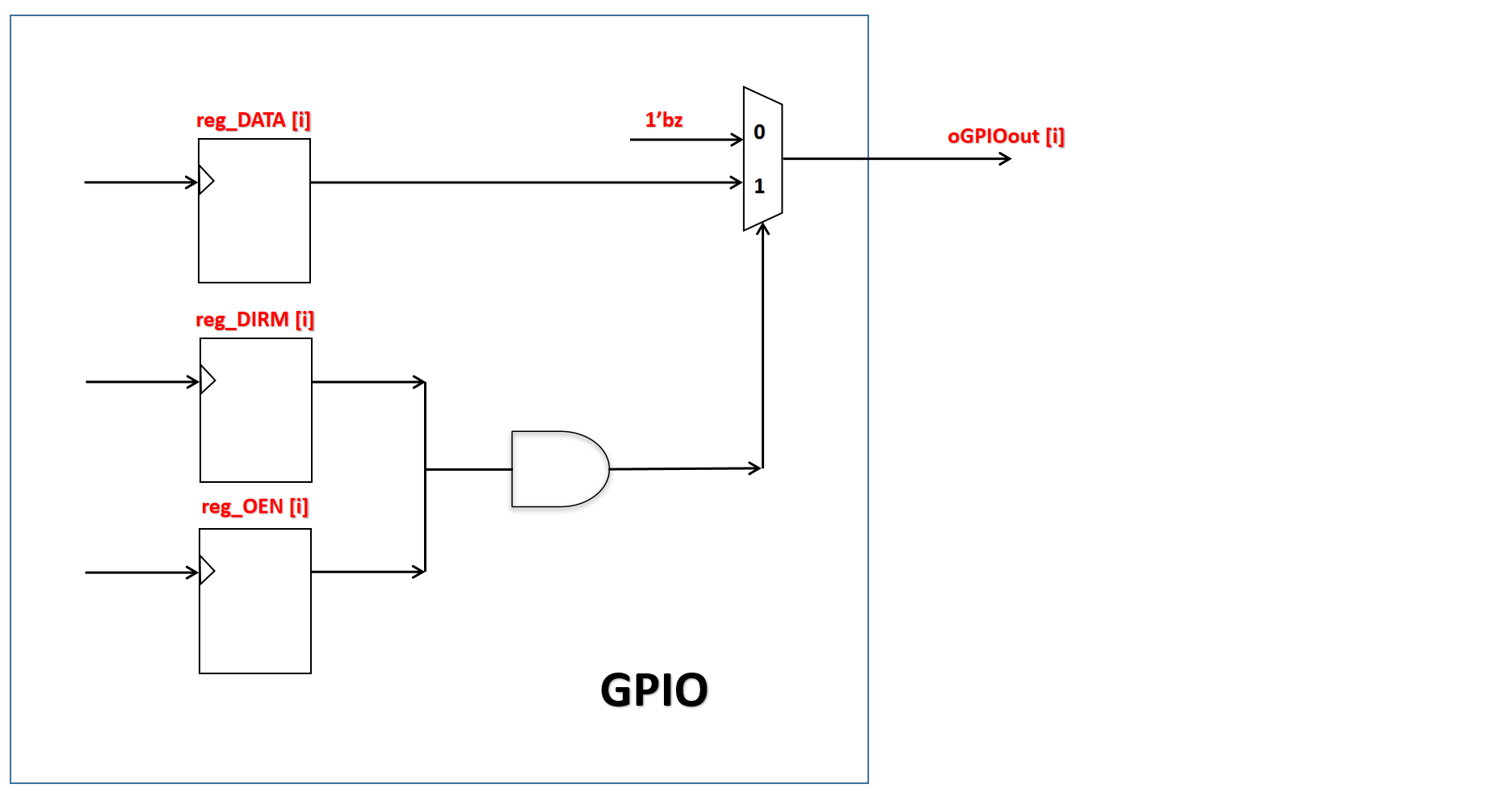
为了避免在设计中引入双向端口,我们为GPIO模块赋予了一个32位输入端口iGPIOin[31:0],一个32位输出端口oGPIOout[31:0],
- 当reg_DIRM[i]=0,
对应i号引脚被DIRM寄存器配置为输入端口,
oGPIOout[i]呈现高阻态1'bz,该位对应的引脚输出功能实际上是不存在的,
iGPIOin[i]将写入reg_DATA_RO[i],此时APB总线可以通过PRDATA[i]了解该引脚的输入状态:
reg [31:0] oGPIOout ;
always @(*) begin
for ( i=0 ; i<32 ; i=i+1 ) begin
if( reg_DIRM[i] & reg_OEN[i] ) begin //output mode
oGPIOout[i] = reg_DATA[i] ;
end else begin
oGPIOout[i] = 1'bz;
end
end
end
- 反之,当reg_DIRM[i]=1,
该引脚被DIRM寄存器配置为输出端口,
oGPIOout[i]的值取决于reg_DATA[i]的情况,
iGPIOin[i]该位对应的引脚输入功能实际上是不存在的,写入reg_DATA_RO[i]的将是oGPIOout[i](即反映驱动该引脚的电平的状态):
for ( i=0 ; i<32 ; i=i+1 ) begin
if ( reg_DIRM[i] ) begin
reg_DATA_RO[i] <= oGPIOout[i] ;// output mode
end else begin
reg_DATA_RO[i] <= iGPIOin[i] ;// input mode
end
end
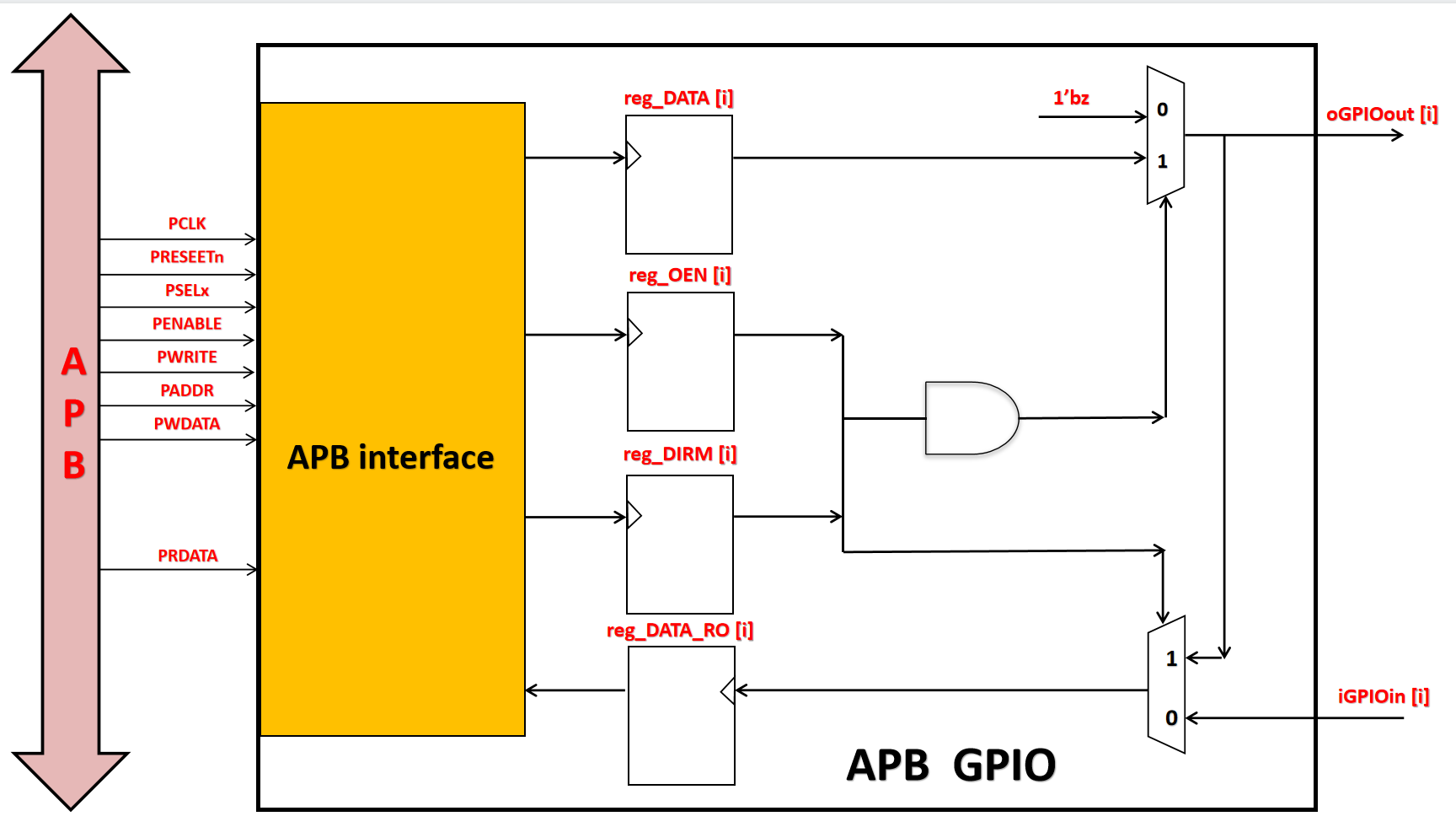
GPIO的输出逻辑如下图所示,
只有DIRM寄存器被配置为输出模式且OEN寄存器被配置为输出使能状态,oGPIOout才会反应DATA寄存器的状态,否则为高阻态:
输入引脚的逻辑则如图中蓝色部分所示,DIRM寄存器被配置为输入模式时将写入只读寄存器DATA_RO,
否则DATA_RO取决于当前输出模式的引脚的输出状态
GPIO模块的完整RTL如下:
module APB_GPIO #(
//ADDR Parameters
parameter ADDR_GPIO = 32'h0000_0000,
parameter OFFSET_GPIO_DATA_RO = 4'h0,
parameter OFFSET_GPIO_DATA = 4'h4,
parameter OFFSET_GPIO_DIRM = 4'h8,
parameter OFFSET_GPIO_OEN = 4'hC
) (
// APB Signal
input iPCLK ,
input iPRESETn,
input iPSEL ,
input iPWRITE ,
input iPENABLE,
input [31:0] iPADDR ,
input [31:0] iPWDATA ,
output [31:0] oPRDATA ,
// I/O Signal
input [31:0] iGPIOin,
output [31:0] oGPIOout
);
/*————————————————————————————————————————————————————————————————————————*
/ APB Signal Register
*————————————————————————————————————————————————————————————————————————*/
reg iPSELx_r ;
reg iPWRITE_r ;
reg [31:0] iPADDR_r ;
reg [31:0] iPWDATA_r ;
always@( posedge iPCLK) begin
if(!iPRESETn) begin
iPWRITE_r <= 1'b0;
iPADDR_r <= 16'b0;
end
else begin
iPWRITE_r <= iPWRITE;
iPWDATA_r <= iPWDATA;
iPADDR_r <= iPADDR;
end
end
/*————————————————————————————————————————————————————————————————————————*
/ GPIO Register Declaration
*————————————————————————————————————————————————————————————————————————*/
// Read Only Data
reg [31:0] reg_DATA_RO;
// GPIO Data
reg [31:0] reg_DATA;
// Direction (in or out)
reg [31:0] reg_DIRM;
// Output Enable
reg [31:0] reg_OEN;
/*————————————————————————————————————————————————————————————————————————*
/ Register Configuration
*————————————————————————————————————————————————————————————————————————*/
integer i;
//reg [31:0] GPIOin_r;
always @(posedge iPCLK ) begin
if( !iPRESETn ) begin
reg_DATA_RO <= 32'b0;
reg_DATA <= 32'b0;
reg_DIRM <= 32'b0;
reg_OEN <= 32'b0;
end
else begin
// reg_DATA, reg_DIRM, reg_OEN
if( iPENABLE && iPWRITE) begin
case ( iPADDR[3:0] )
OFFSET_GPIO_DATA_RO: begin end //DATA_RO is read only register
OFFSET_GPIO_DATA: begin
reg_DATA <= iPWDATA;
end
OFFSET_GPIO_DIRM: begin
reg_DIRM <= iPWDATA;
end
OFFSET_GPIO_OEN: begin
reg_OEN <= iPWDATA;
end
default: begin
reg_DATA <= reg_DATA ;
reg_DIRM <= reg_DIRM ;
reg_OEN <= reg_OEN ;
end
endcase
end
// DATA_RO
for ( i=0 ; i<32 ; i=i+1 ) begin
if ( reg_DIRM[i] ) begin
reg_DATA_RO[i] <= oGPIOout[i] ;// output mode
end else begin
reg_DATA_RO[i] <= iGPIOin[i] ;// input mode
end
end
end
end
/*————————————————————————————————————————————————————————————————————————*
/ I/O
*————————————————————————————————————————————————————————————————————————*/
// iGPIOin -> GPIOin_r -> DATA_RO -> PRADATA
assign oPRDATA = reg_DATA_RO;
// reg_DATA -> GPIOout
reg [31:0] oGPIOout ;
always @(*) begin
for ( i=0 ; i<32 ; i=i+1 ) begin
if( reg_DIRM[i] & reg_OEN[i] ) begin //output mode
oGPIOout[i] = reg_DATA[i] ;
end else begin
oGPIOout[i] = 1'bz;
end
end
end
endmodule
4. Control Unit(流水灯控制单元)模块设计
4.1 有限状态机设计
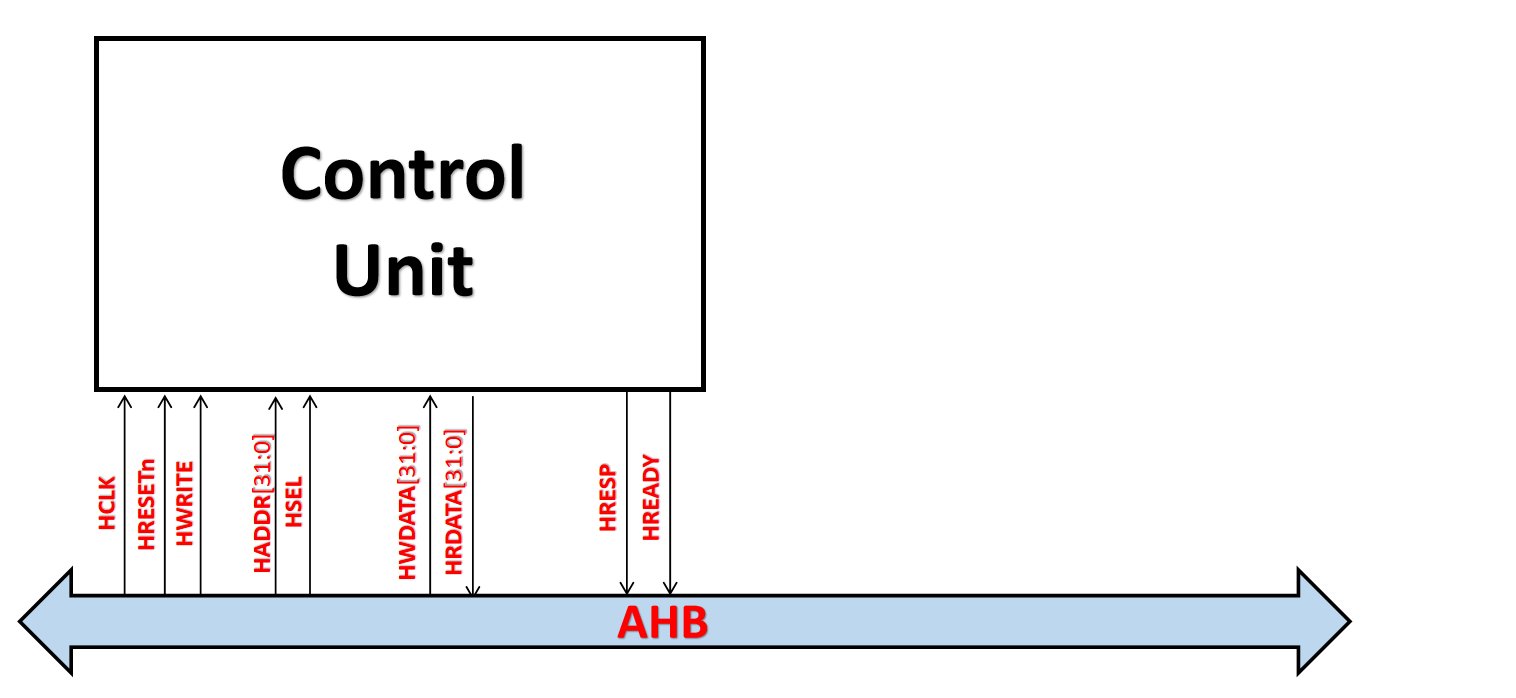
我们的AMBA流水灯控制系统的核心:Control Unit,即控制单元,
Bridge模块是APB上所有外设的Master,而CU模块则是Bridge在AHB上的Master,
可以说是Master中的Master了,
Control Unit是信号传输的发起者,决定总线上是在读还是在写、也决定访问的从机是哪个,
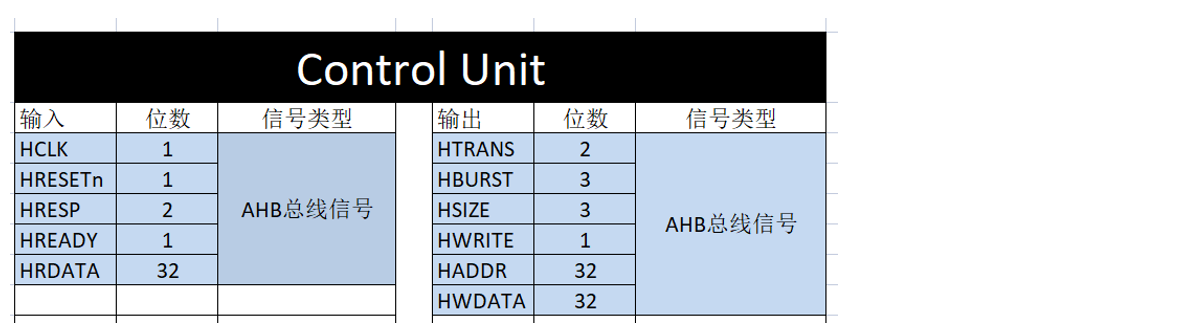
CU发出的控制信号包括HTRANS、HBURST、HSIZE、HADDR,数据信号包括HWDATA,
这些AHB信号如何生成均是由Control Unit负责的,
同时CU也需要接收HRDATA,并对其进行解读判断,
那么这些AHB信号是如何生成的呢?
实际上,Control Unit模块也是通过一个有限状态机实现的:

下面介绍一下该有限状态机各个状态的含义:
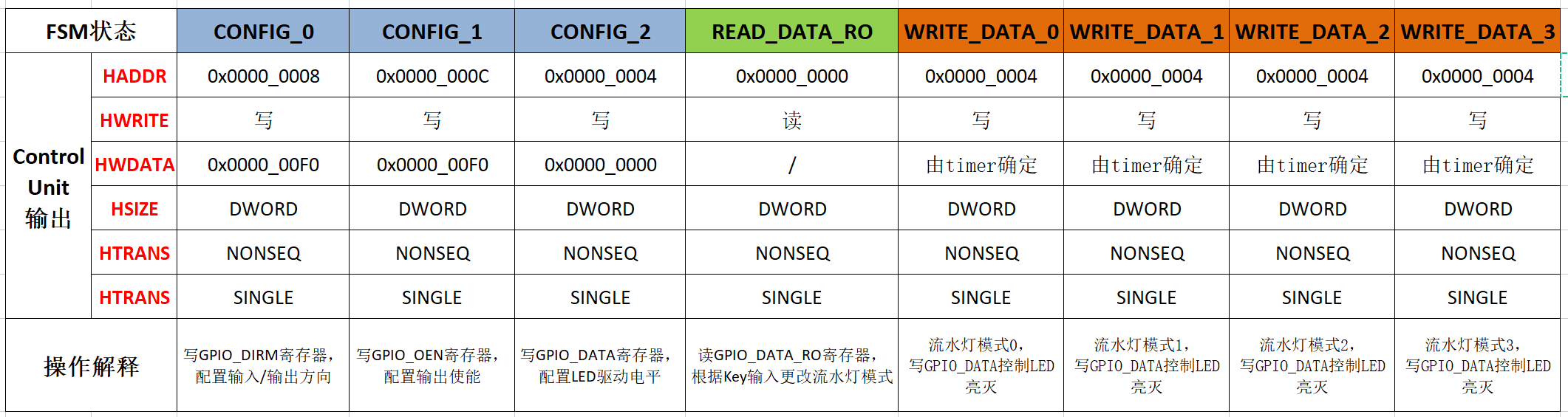
CONFIG_0~2:按下复位按钮/上电后,对GPIO外设进行初始化配置,
其中,
CONFIG_0:
将GPIO的0~3位引脚配置为输入模式,连接FPGA开发板的Key按键进行观测
将GPIO的4~7位引脚配置为输出模式,连接FPGA开发板的LED灯进行驱动控制
CONFIG_1:
将GPIO的4~7位引脚的输出电平均设定为低电平0(本开发板上的LED为共阳极)
CONFIG_2:
对GPIO的4~7位引脚进行输出使能,点亮所有LED灯
READ_GPIO_DATA_RO:
读GPIO的DATA_RO寄存器,根据寄存器[3:0]的值得知Key状态,
该状态是核心状态,
当配置完GPIO的DIRM、OEN、DATA寄存器后,
我们会开始反复进行读DATA_RO,即观测KEY的状态,
然后根据KEY的值得到对应的LED_mode,
随后会由该状态跳向WRITE_DATA_0~3,对DATA寄存器进行配置,控制LED灯点亮or熄灭
WRITE_DATA_0~3:
配置不同的流水灯灯工作模式,模式由KEY状态决定,
按下KEY1进入工作模式0,按下KEY2进入工作模式1,按下KEY3进入工作模式2,按下KEY4进入工作模式3,
在初始静止状态下,只有同时按下KEY0~3才能进入工作模式0,
此时按下某个单独的KEY不会有任何反应的
随着FSM状态的改变,CU模块将会给AHB总线发出不同的读写命令,从而实现对GPIO模块的寄存器配置,
下表具体地整理了FSM状态和CU模块生成的AHB信号之间的对应关系:
上述FSM状态转换逻辑所对应的RTL:
reg [2:0] CU_state;
always @(posedge iHCLK ) begin
if ( !iHRESETn ) begin
CU_state <= CONFIG_0;
end else begin
case (CU_state)
// write GPIO_DIRM
CONFIG_0: begin
if ( iHREADY ) begin
CU_state <= CONFIG_1;
end else begin
CU_state <= CONFIG_0;
end
end
// write GPIO_DATA
CONFIG_1: begin
if ( iHREADY ) begin
CU_state <= CONFIG_2;
end else begin
CU_state <= CONFIG_1;
end
end
// write GPIO_OEN
CONFIG_2: begin
if ( iHREADY && iHRDATA[3:0] == 4'b0000) begin
CU_state <= READ_DATA_RO;
end else begin
CU_state <= CONFIG_2;
end
end
// read DATA_RO
READ_DATA_RO: begin
if ( iHREADY && iHRDATA[3:0] == 4'b1110) begin //key1 pressed
CU_state <= WRITE_DATA_0;
end else if ( iHREADY && iHRDATA[3:0] == 4'b1101) begin //key2 pressed
CU_state <= WRITE_DATA_1;
end else if ( iHREADY && iHRDATA[3:0] == 4'b1011) begin //key3 pressed
CU_state <= WRITE_DATA_2;
end else if ( iHREADY && iHRDATA[3:0] == 4'b0111) begin //key4 pressed
CU_state <= WRITE_DATA_3;
end else if ( iHREADY && led_mode[0] ) begin //keep mode0 if not pressed this moment
CU_state <= WRITE_DATA_0;
end else if ( iHREADY && led_mode[1] ) begin //keep mode1
CU_state <= WRITE_DATA_0;
end else if ( iHREADY && led_mode[2] ) begin //keep mode2
CU_state <= WRITE_DATA_1;
end else if ( iHREADY && led_mode[3] ) begin //keep mode3
CU_state <= WRITE_DATA_2;
end else begin
CU_state <= READ_DATA_RO; // Slave not ready || no key ever been pressed
end
end
// write DATA
WRITE_DATA_0 : begin
if ( iHREADY ) begin
CU_state <= READ_DATA_RO;
end else begin
CU_state <= CU_state;
end
end
// write DATA
WRITE_DATA_1 : begin
if ( iHREADY ) begin
CU_state <= READ_DATA_RO;
end else begin
CU_state <= CU_state;
end
end
// write DATA
WRITE_DATA_2 : begin
if ( iHREADY ) begin
CU_state <= READ_DATA_RO;
end else begin
CU_state <= CU_state;
end
end
WRITE_DATA_3 : begin
if ( iHREADY ) begin
CU_state <= READ_DATA_RO;
end else begin
CU_state <= CU_state;
end
end
default: CU_state <= CONFIG_0;
endcase
end
end
LED灯的亮灭改变,是通过配置GPIO内的寄存器实现的,
具体来说,是将HWDATA写入GPIO中的reg_DATA[7:4],
在绪论章节中,我们介绍过LED_mode的编码方式:
// LED_mode Parameters
parameter MODE0 = 4'b0001,
parameter MODE1 = 4'b0010,
parameter MODE2 = 4'b0100,
parameter MODE3 = 4'b1000,
采用了One-hot编码,这是为了对HWDATA进行assign赋值的时候,判断条件写起来简便一些,
现在我们就可以设计出各种流水灯模式下的组合逻辑了,
各模式下的LED亮灭随时间改变是通过计时器辅助的,
也就是下面代码中的timer,timer是一个32为寄存器:
reg [31:0] timer ;
always @ (posedge iHCLK or negedge iHRESETn) begin
if ( !iHRESETn )
timer <= 32'd0; // when the reset signal valid,time counter clearing
else if (timer == 32'd199_999_999) // 4 seconds count(50M*4-1=199999999)
timer <= 32'd0; // count done,clearing the time counter
else
timer <= timer + 1'b1; // timer counter = timer counter + 1
end
本质是将每一秒分成了50M帧(系统工作时钟频率为50MHz),
我们用assign语句给不同的帧下的HWDATA赋不同的值就行了,
首先是普通流水灯模式(工作模式0):
(注意,下面的LED[3:0]在WRITE_DATA_0~3状态下将会作为HWDATA[7:4]对GPIO_DATA寄存器进行配置)
assign LED[3:0] =
// mode0 普通流水灯模式
( led_mode[0] && timer >= 32'd149_999_999 ) ? 4'b0111 : // LED4亮
( led_mode[0] && timer >= 32'd99_999_999 ) ? 4'b1011 : // LED3亮
( led_mode[0] && timer >= 32'd49_999_999 ) ? 4'b1101 : // LED2亮
( led_mode[0] ) ? 4'b1110 : // LED1亮
....(其他模式)
这里就体现出One-hot编码的好处了,可以用( led_mode[0] )作为是否处于模式0的判定,
否则需要写成( led_mode == MODE_0 ),
接下来是加速流水灯模式(工作模式1):
assign LED[3:0] =
// mode1 加速流水灯模式
( led_mode[1] && timer >= 32'd174_999_999 ) ? 4'b0111 : // LED4亮
( led_mode[1] && timer >= 32'd149_999_999 ) ? 4'b1011 : // LED3亮
( led_mode[1] && timer >= 32'd124_999_999 ) ? 4'b1101 : // LED2亮
( led_mode[1] && timer >= 32'd99_999_999 ) ? 4'b1110 : // LED1亮
( led_mode[1] && timer >= 32'd74_999_999 ) ? 4'b0111 : // LED4亮
( led_mode[1] && timer >= 32'd49_999_999 ) ? 4'b1011 : // LED3亮
( led_mode[1] && timer >= 32'd24_999_999 ) ? 4'b1101 : // LED2亮
( led_mode[1] ) ? 4'b1110 : // LED1亮
....(其他模式)
心跳模式(工作模式2):
assign LED[3:0] =
// mode2 心跳模式
( led_mode[2] && timer >= 32'd189_999_999 ) ? 4'b0000 : // 全亮
( led_mode[2] && timer >= 32'd179_999_999 ) ? 4'b1111 : // 全灭
( led_mode[2] && timer >= 32'd169_999_999 ) ? 4'b0000 : // 全亮
( led_mode[2] ) ? 4'b1111 : // 全灭
....(其他模式)
最后是呼吸灯模式(工作模式3),
该模式相对复杂一些,前面提到过是通过改变占空比控制LED灯亮度的,
占空比的改变是通过对timer的判断实现的,
举个例子:
assign LED[3:0] =
// 占空比 1/4 = 25%
( led_mode[3] && (timer >= 32'd89_999_999 ) && (timer[1:0] == 2'b00 ) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd89_999_999 ) ) ? 4'b1111 :
....(其他模式)
(timer[1:0] == 2'b00 )的判定,在timer的值每增加4的过程中,必定出现且只出现1次,
这样在 (timer >= 32'd89_999_999 )的这段期间内,
LED灯的驱动引脚就会在25%的时间里处于低电平(点亮),剩下的75%时间里处于高电平(熄灭),
同理,(timer[2:0] == 3'b0 )就能得到1/8的占空比,也就是12.5%,
这样就有:
assign LED[3:0] =
// mode3 呼吸灯模式
// 占空比 0%
( led_mode[3] && (timer >= 32'd189_999_999) ) ? 4'b1111 :
// 占空比 1/64 = 1.56%
( led_mode[3] && (timer >= 32'd169_999_999) && (timer[5:0] == 6'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd169_999_999) ) ? 4'b1111 :
// 占空比 1/32 = 3.12%
( led_mode[3] && (timer >= 32'd149_999_999) && (timer[4:0] == 5'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd149_999_999) ) ? 4'b1111 :
// 占空比 1/16 = 6.25%
( led_mode[3] && (timer >= 32'd129_999_999) && (timer[3:0] == 4'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd129_999_999) ) ? 4'b1111 :
// 占空比 1/8 = 12.5%
( led_mode[3] && (timer >= 32'd109_999_999) && (timer[2:0] == 3'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd109_999_999) ) ? 4'b1111 :
// 占空比 1/4 = 25%
( led_mode[3] && (timer >= 32'd89_999_999 ) && (timer[1:0] == 2'b00 ) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd89_999_999 ) ) ? 4'b1111 :
// 12.5%
( led_mode[3] && (timer >= 32'd69_999_999 ) && (timer[2:0] == 3'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd69_999_999 ) ) ? 4'b1111 :
// 6.25%
( led_mode[3] && (timer >= 32'd49_999_999 ) && (timer[3:0] == 4'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd49_999_999 ) ) ? 4'b1111 :
// 3.12%
( led_mode[3] && (timer >= 32'd29_999_999 ) && (timer[4:0] == 5'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd29_999_999 ) ) ? 4'b1111 :
// 1.56%
( led_mode[3] && (timer >= 32'd9_999_999 ) && (timer[5:0] == 6'b000) ) ? 4'b0000 :
( led_mode[3] && (timer >= 32'd9_999_999 ) ) ? 4'b1111 :
// 0%
( led_mode[3] ) ? 4'b1111 :
....(其他模式)
可以看出上述代码实现了占空比从0% → 1.56% → 3.12% → 6.25% → 12.5% → 25% → 12.5% → 6.25% → 3.12% → 1.56% → 0%的等时间间隔变化,
由于开发板LED灯功率较高,在25%到100%之间的占空比,LED灯亮度都会很高,看不出太大变化,
因此我们将25%设定为了最高的占空比,对应LED灯最亮的时刻。
至此,Control Unit的设计就介绍完了,下面我们将演示系统在FPGA开发板上的实际运行视频
5. FPGA验证
本项目所用开发板型号:XC7A35T-2FGG484I
上板验证视频:
(视频制作中,录制完会第一时间更新视频链接)
文章来源: 博客园
原文链接: https://www.cnblogs.com/sjtu-zsj-990702/p/17251396.html
- 还没有人评论,欢迎说说您的想法!



 客服
客服


