
首先,我们来开一下计算机是如何检测边缘的。以灰度图像为例,它的理论基础是这样的,如果出现一个边缘,那么图像的灰度就会有一定的变化,为了方便假设由黑渐变为白代表一个边界,那么对其灰度分析,在边缘的灰度函数就是一个一次函数y=kx,对其求一阶导数就是其斜率k,就是说边缘的一阶导数是一个常数,而由于非边缘的一阶导数为零,这样通过求一阶导数就能初步判断图像的边缘了。通常是X方向和Y方向的导数,也就是梯度。理论上计算机就是通过这种方式来获得图像的边缘。
但是,具体应用到图像中你会发现这个导数是求不了的,因为没一个准确的函数让你去求导,而且计算机在求解析解要比求数值解麻烦得多,所以就想到了一种替代的方式来求导数。就是用一个3×3的窗口来对图像进行近似求导。拿对X方向求导为例,某一点的导数为第三列的元素之和减去第一列元素之和,这样就求得了某一点的近似导数。其实也很好理解为什么它就近似代表导数,导数就代表一个变化率,从第一列变为第三列,灰度值相减,当然就是一个变化率了。这就是所谓的Prewitt算子。这样近似X方向导数就求出来了。Y方向导数与X方向导数求法相似,只不过是用第三行元素之和减去第一行元素之和。X方向和Y方向导数有了,那么梯度也就出来了。这样就可以找出一幅图中的边缘了。
还有一个问题,由于求的是3×3中心点的导数,所以给第二列加了一个权重,它的权重为2,第一列和第三列的权重为1,好了,这就是Sobel算子了。相比Prewitt算子,Sobel的抗噪能力更强。如图所示:
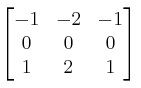
这样,中心点的Y方向导数就求出来了。
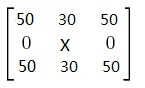
举个例子吧。X点以Sobel方式求导数ΔX=1×50+2×30+1×50-(1×50+2×30+1×50)=0。这样可以看出这个点不是边界。
好了,了解了基本理论之后,我们看看OpenCv下的Sobel函数吧,void cvSobel( const CvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size=3 );src:输入图像;dst:输出图像;xorder:x 方向上的差分阶数;yorder:y 方向上的差分阶数;aperture_size 扩展 Sobel 核的大小(既窗口阶数),必须是 1(注意这是一个3×1或1×3向量而不是一个方阵), 3, 5 或 7。
其实,这里是问题的,因为以Sobel方式求完导数后会有负值,还有会大于255的值而你建的Sobel的图像是 IPL_DEPTH_8U,也就是8位无符号数,所以Sobel建立的图像位数不够,要16位有符号的,也就是 IPL_DEPTH_16S。把建立图像这句改为
sobel=cvCreateImage(cvGetSize(frame),IPL_DEPTH_16S,1);运行,发现不报错了,但是Sobel图像显示不出来,这是什么原因呢?原来图像显示是以8位无符号显示的,现在是16位有符号,当然显示会出问题了。所以还要将Sobel转为8位无符号。OpenCv里提供了一个函数,就是cvConvertScaleAbs( const CvArr* src, CvArr* dst, double scale=1, double shift=0 );src:源图像;dst:目标图像;scale:转化前乘的系数;shift转化前加的系数。这样新建一个无符号图像再转换就可以实现了。
IplImage *sobel8u=cvCreateImage(cvGetSize(sobel),IPL_DEPTH_8U,1);
再在显示图像前加上cvConvertScaleAbs(sobel,sobel8u,1,0);这样就可以看到cvSobel的效果了。可以看X方向或Y方向求导是什么效果。
代码如下
1 //Sobel边缘检测的程序 2 #include "cv.h" 3 #include "highgui.h" 4 int main( int argc , char** argv) 5 { 6 //以灰度图格式加载图像或者用函数cvCvtColor(frame,gray,CV_BGR2GRAY);转为灰度 7 IplImage* src = cvLoadImage(argv[1],CV_LOAD_IMAGE_GRAYSCALE); 8 //以sobel方式求完导之后会有负数,会有大于255的值,故建立图像的数据格式 9 //要为IPL_DEPTH_16S 10 IplImage* dst1 = cvCreateImage(cvGetSize(src),IPL_DEPTH_16S,1); 11 IplImage* dst2 = cvCreateImage(cvGetSize(src),IPL_DEPTH_16S,1); 12 IplImage* dst18u = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1); 13 IplImage* dst28u = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1); 14 //逼近x方向上一阶微分的Sobel算子的效果 15 cvSobel( 16 src, 17 dst1, 18 1, 19 0, 20 3); 21 //逼近y方向上一阶微分的Sobel算子的效果 22 cvSobel( 23 src, 24 dst2, 25 0, 26 1, 27 3); 28 //图像是以8位无符号显示的,故要把输出图像的数据格式转化为IPL_DEPTH_8U 29 cvConvertScaleAbs(dst1,dst18u,1,0); 30 cvConvertScaleAbs(dst2,dst28u,1,0); 31 cvNamedWindow("src",1); 32 cvNamedWindow("dst1",1); 33 cvNamedWindow("dst2",1); 34 cvShowImage("src",src); 35 cvShowImage("dst1",dst18u); 36 cvShowImage("dst2",dst28u); 37 cvWaitKey(0); 38 cvReleaseImage(&src); 39 cvReleaseImage(&dst1); 40 cvReleaseImage(&dst2); 41 cvReleaseImage(&dst18u); 42 cvReleaseImage(&dst28u); 43 cvDestroyWindow("src"); 44 cvDestroyWindow("dst1"); 45 cvDestroyWindow("dst2"); 46 return 0; 47 }
- 还没有人评论,欢迎说说您的想法!



 客服
客服


