
一、垃圾收集算法
由于垃圾收集算法的实现涉及大量的程序细节,而且各个平台的虚拟机操作内存的方法又各不相同,因此本节不打算过多地讨论算法的实现,只是介绍几种算法的思想及其发展过程。
垃圾收集算法概要
1、 标记-清除算法
标记-清除算法最基础的收集算法是“标记-清除”(Mark-Sweep)算法,算法分为“标记”和“清除”两个阶段:首先标记出所有需要回收的对象,在标记完成后统一回收所有被标记的对象,它的标记过程其实在前一节讲述对象标记判定时已经介绍过了。之所以说它是最基础的收集算法,是因为后续的收集算法都是基于这种思路并对其不足进行改进而得到的。它的主要不足有两个:一个是效率问题,标记和清除两个过程的效率都不高;另一个是空间问题,标记清除之后会产生大量不连续的内存碎片,空间碎片太多可能会导致以后在程序运行过程中需要分配较大对象时,无法找到足够的连续内存而不得不提前触发另一次垃圾收集动作。标记—清除算法的执行过程如图3-2所示。

图3-2“标记-清除”算法示意图
2、复制算法
为了解决效率问题,一种称为“复制”(Copying)的收集算法出现了,它将可用内存按容量划分为大小相等的两块,每次只使用其中的一块。当这一块的内存用完了,就将还存活着的对象复制到另外一块上面,然后再把已使用过的内存空间一次清理掉。这样使得每次都是对整个半区进行内存回收,内存分配时也就不用考虑内存碎片等复杂情况,只要移动堆顶指针,按顺序分配内存即可,实现简单,运行高效。只是这种算法的代价是将内存缩小为了原来的一半,未免太高了一点。复制算法的执行过程如图3-3所示。
现在的商业虚拟机都采用这种收集算法来回收新生代,IBM公司的专门研究表明,新生代中的对象98%是“朝生夕死”的,所以并不需要按照1∶1的比例来划分内存空间,而是将内存分为一块较大的Eden空间和两块较小的Survivor空间,每次使用Eden和其中一块Survivor[插图]。当回收时,将Eden和Survivor中还存活着的对象一次性地复制到另外一块Survivor空间上,最后清理掉Eden和刚才用过的Survivor空间。HotSpot虚拟机默认Eden和Survivor的大小比例是8∶1,也就是每次新生代中可用内存空间为整个新生代容量的90%(80%+10%),只有10%的内存会被“浪费”。

图3-3 复制算法示意图
3、标记-整理算法
“标记-整理”(Mark-Compact)算法,标记过程仍然与“标记-清除”算法一样,但后续步骤不是直接对可回收对象进行清理,而是让所有存活的对象都向一端移动,然后直接清理掉端边界以外的内存,“标记-整理”算法的示意图如图3-4所示。
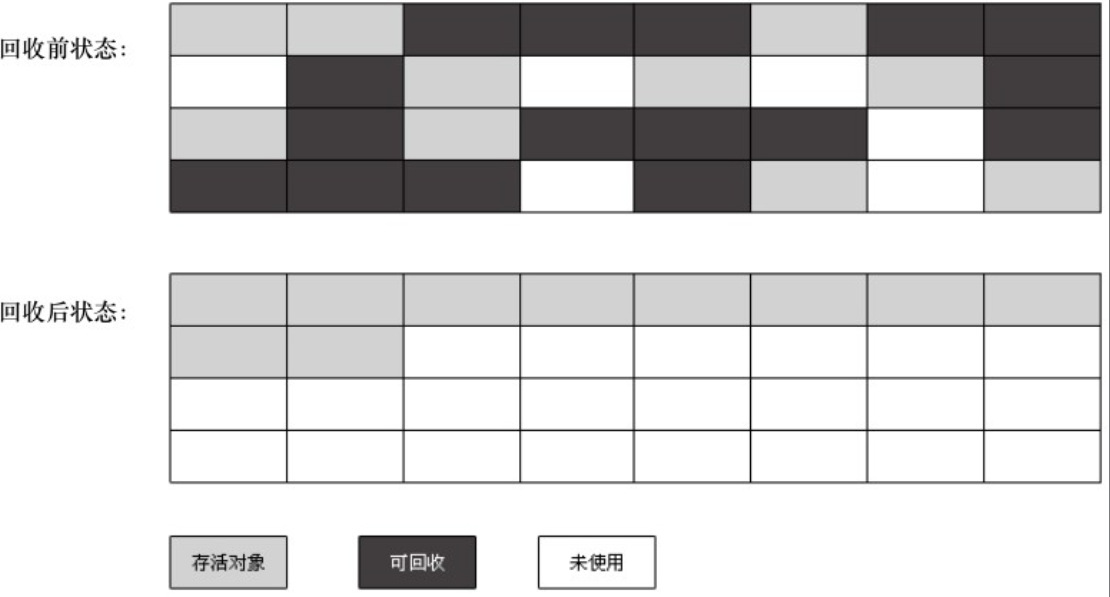
图3-4“标记-整理”算法示意图
4、分代收集算法
当前商业虚拟机的垃圾收集都采用“分代收集”(Generational Collection)算法,根据对象存活周期的不同将内存划分为几块。一般是把Java堆分为新生代和老年代,这样就可以根据各个年代的特点采用最适当的收集算法。在新生代中,每次垃圾收集时都发现有大批对象死去,只有少量存活,那就选用复制算法,只需要付出少量存活对象的复制成本就可以完成收集。而老年代中因为对象存活率高、没有额外空间对它进行分配担保,就必须使用“标记—清理”或者“标记—整理”算法来进行回收。
二、HotSpot的算法实现
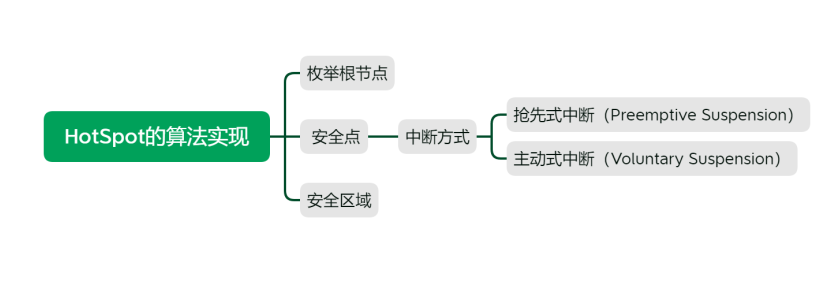
HotSpot的算法实现概要
1、枚举根节点
由于目前的主流Java虚拟机使用的都是准确式GC(这个概念在第1章介绍Exact VM对Classic VM的改进时讲过),所以当执行系统停顿下来后,并不需要一个不漏地检查完所有执行上下文和全局的引用位置,虚拟机应当是有办法直接得知哪些地方存放着对象引用。
在HotSpot的实现中,是使用一组称为OopMap的数据结构来达到这个目的的,在类加载完成的时候,HotSpot就把对象内什么偏移量上是什么类型的数据计算出来,在JIT编译过程中,也会在特定的位置记录下栈和寄存器中哪些位置是引用。这样,GC在扫描时就可以直接得知这些信息了。
2、 安全点
HotSpot没有为每条指令都生成OopMap,只是在“特定的位置”记录了这些信息,这些位置称为安全点(Safepoint),即程序执行时并非在所有地方都能停顿下来开始GC,只有在到达安全点时才能暂停。
2.1 GC时中断方式
如何在GC发生时让所有线程(这里不包括执行JNI调用的线程)都“跑”到最近的安全点上再停顿下来。这里有两种方案可供选择:抢先式中断(Preemptive Suspension)和主动式中断(Voluntary Suspension)
2.1.1 抢先式中断(Preemptive Suspension)
抢先式中断不需要线程的执行代码主动去配合,在GC发生时,首先把所有线程全部中断,如果发现有线程中断的地方不在安全点上,就恢复线程,让它“跑”到安全点上。现在几乎没有虚拟机实现采用抢先式中断来暂停线程从而响应GC事件。
2.1.2 主动式中断(Voluntary Suspension)
主动式中断的思想是当GC需要中断线程的时候,不直接对线程操作,仅仅简单地设置一个标志,各个线程执行时主动去轮询这个标志,发现中断标志为真时就自己中断挂起。轮询标志的地方和安全点是重合的,另外再加上创建对象需要分配内存的地方。
3、安全区域
使用Safepoint似乎已经完美地解决了如何进入GC的问题,但实际情况却并不一定。Safepoint机制保证了程序执行时,在不太长的时间内就会遇到可进入GC的Safepoint。但是,程序“不执行”的时候呢?所谓的程序不执行就是没有分配CPU时间,典型的例子就是线程处于Sleep状态或者Blocked状态,这时候线程无法响应JVM的中断请求,“走”到安全的地方去中断挂起,JVM也显然不太可能等待线程重新被分配CPU时间。对于这种情况,就需要安全区域(Safe Region)来解决。
安全区域是指在一段代码片段之中,引用关系不会发生变化。在这个区域中的任意地方开始GC都是安全的。我们也可以把Safe Region看做是被扩展了的Safepoint。
在线程执行到Safe Region中的代码时,首先标识自己已经进入了Safe Region,那样,当在这段时间里JVM要发起GC时,就不用管标识自己为Safe Region状态的线程了。在线程要离开Safe Region时,它要检查系统是否已经完成了根节点枚举(或者是整个GC过程),如果完成了,那线程就继续执行,否则它就必须等待直到收到可以安全离开Safe Region的信号为止。
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!



 客服
客服


