首先来看一下需要操作的函数,以及配置的步骤:
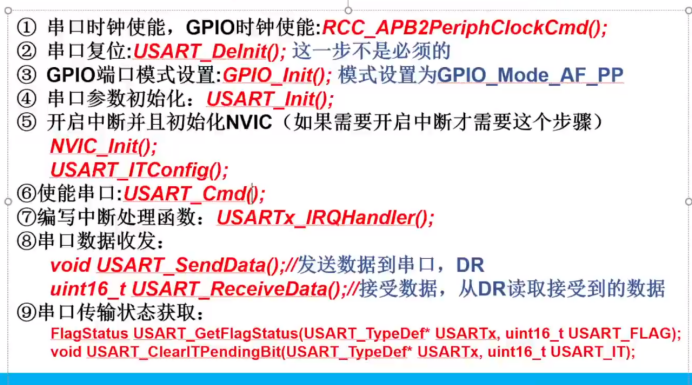
图1
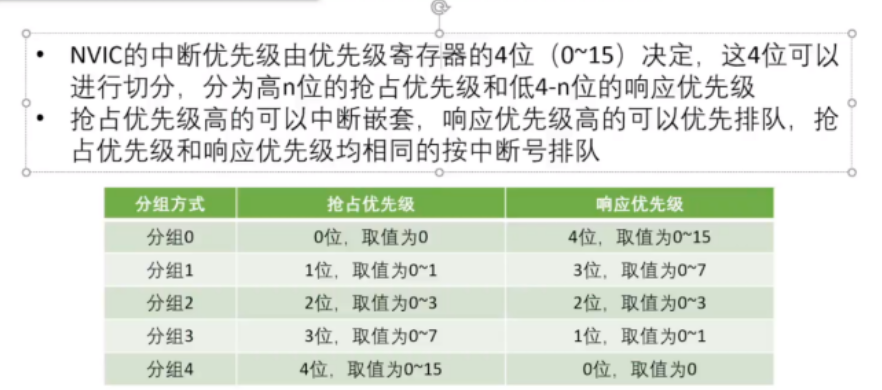
图2
Code: usart.c
#include "usart.h"
void ustart_Init(void )
{
GPIO_InitTypeDef GPIO_Init_Ustar ; // 定义输出端口TX的结构体对象
USART_InitTypeDef USTART_Init; // 定义串口初始化结构体对象
NVIC_InitTypeDef NVIC_InitStructure; // 定义中断优先级组结构体对象
//配置中断优先级,以及中断的模式
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2 ); //中断组选择器,也就是中断组的模式的配置,此处选择中断组2
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn ; // 设置中断的模式,串口1中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= 1; //设置主优先级,首先比较主,如果主优先级相同,再进行比较子优先级,如果前面的两者都相同在比较中断号,具体可以参考图2
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; // 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE ; //中断使能,也就是打开中断的意思
NVIC_Init(&NVIC_InitStructure); // 初始化中断寄存器结构体
/* 配置输出端口结构体配置及其初始化*/
RCC_APB2PeriphClockCmd( GPIO_USTAR_CLK , ENABLE ) ;// 打开GPIO时钟
GPIO_Init_Ustar.GPIO_Pin= GPIO_USTAR_TX_PIN ; // 设置输出端口
GPIO_Init_Ustar.GPIO_Speed=GPIO_Speed_50MHz; // 配置输出的速度
GPIO_Init_Ustar.GPIO_Mode= GPIO_Mode_AF_PP; // 设置串口模式,设置为推挽输出
GPIO_Init(GPIO_USTAR_PORT , & GPIO_Init_Ustar); // 初始化输出端口的结构体
/* 配置输入端口结构体配置及其初始化*/
GPIO_Init_Ustar.GPIO_Pin= GPIO_USTAR_RX_PIN ; // 设置输出端口
GPIO_Init_Ustar.GPIO_Mode=GPIO_Mode_IN_FLOATING; // 设置串口模式,设置为浮空输入
GPIO_Init(GPIO_USTAR_PORT , & GPIO_Init_Ustar); // 初始化输出端口的结构体
//配置串口初始化结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE ); // 打开串口时钟
USTART_Init.USART_BaudRate= USART_BaudRate1 ; //配置传输的波特率
USTART_Init.USART_HardwareFlowControl=USART_HardwareFlowControl_None ; //配置硬件流,通常采用无流的方式进行
USTART_Init.USART_Mode=USART_Mode_Rx|USART_Mode_Tx ; // 设置是否启用传输或者是接收模式,此处配置的是既可以接收,又可以发送
USTART_Init.USART_Parity=DISABLE; // 是否打开校验位,此处不进行校验
USTART_Init.USART_StopBits=USART_StopBits_1 ; //配置停止位
USTART_Init.USART_WordLength= USART_WordLength_8b ; // 配置长度
USART_Init(USART1,&USTART_Init); //通过定义的结构体初始化串口一
// 使能串口,注意串口进行了初始化需要进行使能,如果没有进行使能那么将无法进行使用
USART_Cmd(USART1,ENABLE );
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE) ; // 溢出中断标志,这里一旦打开,当发生溢出时候,将回去执行中断服务函数,否则将不会执行中断服务函数
/* 注意这里的中断函数在stm32启动文件中,不能自己随意为中断函数命名,需要自己去查找函数名称,进行编写是实现。注意函数名称在启动文件中,
一定不要自己随便取函数名,这样发生中断的时候,也不会执行,所以程序竟会陷入死循环,并且没有任何的现象*/
/*发送字符串的函数*/
}
void usart_TX_String(uint8_t *str){
while(*str!='�') // 取出指针中的内容并进行判断
{
USART_SendData(USART1 ,*str); // 发送一个数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); // 判断发送数据是否结束,也就是相当于51单片机中的TI发送结束标志位
str=str+1; // 注意这里的指针的偏移只是偏移一个字符的所占的空间的大小。所以不能使用str++,因为这样偏移的是一个指针整体的大小。
}
}
Code: usart.h
#ifndef _USART_H_
#define _USART_H_
#include "stm32f10x.h"
// GOPIO端口宏定义
#define GPIO_USTAR_PORT GPIOA // 定义寄存器
#define GPIO_USTAR_TX_PIN GPIO_Pin_9 // 定义输出端口
#define GPIO_USTAR_RX_PIN GPIO_Pin_10 // 定义输入端口
#define GPIO_USTAR_CLK RCC_APB2Periph_GPIOA // 定义GPIO端口时钟
//串口配置
#define USART_BaudRate1 9600 //设置串口的波特率
void ustart_Init(void ) ; // 串口初始化函数声明
void usart_TX_String(uint8_t *str); // 发送一个字符串的函数申明
//注意;这里不是变量的定义,这里是申明,使用的extern进行变量的申明,格式和定义的格式必须相同,只是多一个关键子extern
extern uint8_t Buf[200]; //定义一个八位的数组,每一个数组元素都是一个字节大小,数组的总长为200
extern uint16_t REC_STA; //用于接收计数,状态标志,这里是一个16位变量,最大位#0xFFFF
#endif
void SysTick_Handler(void)
{
}
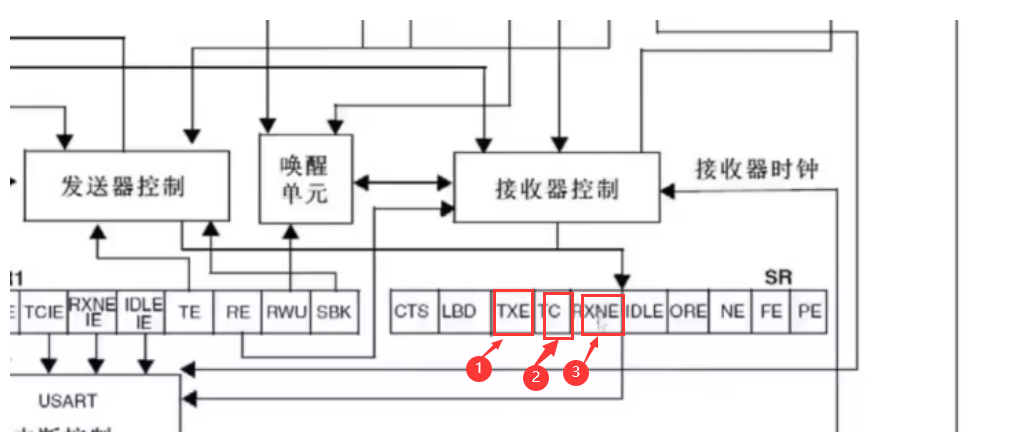
判断数据发送是否完毕可以判断: TXE 、 TC 位都可以
判断数据是否接收到数据可以使用RXNE进行判断
Code: 中断处理函数:需要注意这里的函数名称不能自己随意命名:startup_stm32f10x_hd.s中查找对应的串口的函数名称。
void USART1_IRQHandler(void) {
uint8_t data=0; //接收数据临时变量
if( USART_GetITStatus(USART1,USART_IT_RXNE)!= RESET)
{
data= USART_ReceiveData(USART1) ; //接收一个字节数据
USART_SendData(USART1,data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
}
}
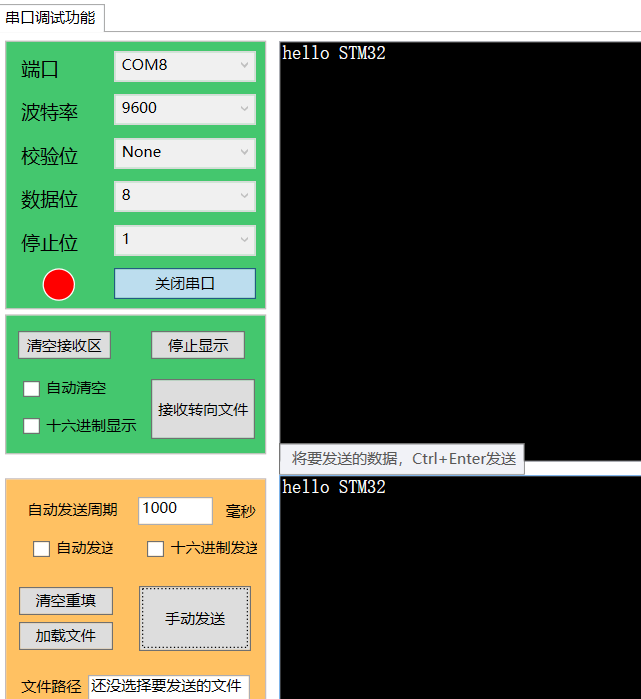
运行结果:
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!
 客服
客服


