
最近数字图像处理课要求用C++处理BMP图像,我很无语,有大好的matlab不用。。。。
但是,利用C++去写的话确实会对原理和codeing水平有些帮助,所以认真写了。。
实验环境:windows10+Clion+MinGW64
参考资料:https://blog.csdn.net/qq_36752072/article/details/78151770
本工程所使用的头文件:
#include<iostream> #include <cmath> #include <windows.h> #include <stdio.h>
1、原理部分:
要进行BMP图像的处理,那我们首先就要了解BMP图片的格式,其实主要分为四个部分:
1、位图文件头数据(BITMAPFILEHEADER):这个数据结构包含了BMP图像文件的类型、大小等信息;
typedef struct targetBITMAPFILEHEADER{ WORD bfType; //文件类型,对于位图来说,这一部分为0x4d42 DWORD bfSize; //文件大小(包含这14字节) WORD bfReserved1; //保留字,不考虑 WORD bfReserved2; //保留字,同上 DWORD bfOffBits; //实际位图数据的偏移字节数,即前三个部分长度之和 }BITMAPFILEHEADER;
2、位图信息头数据(BITMAPINFOHEADER):这个数据结构则是包含了BMP图像数据的宽、高、压缩方法、定义颜色、占用空间等等信息;
typedef struct targetBITMAPINFOHEADER{ DWORD biSize; //指定此结构体的长度,为40 LONG biWidth; //位图宽 LONG biHeight; //位图高 WORD biPlanes; //平面数,为1 WORD biBitCount; //采用颜色位数,可以是1,2,4,8,16,24,新的可以是32 DWORD biCompression; //压缩方式,可以是0,1,2,其中0表示不压缩 DWORD biSizeImage; //实际位图数据占用的字节数 LONG biXPelsPerMeter; //X方向分辨率 LONG biYPelsPerMeter; //Y方向分辨率 DWORD biClrUsed; //使用的颜色数,如果为0,则表示默认值(2^颜色位数) DWORD biClrImportant; //重要颜色数,如果为0,则表示所有颜色都是重要的 }BITMAPINFOHEADER;
3、调色板(RGBQUAD):其中,这一部分的数据结构是可选择的,有些为徒需要调色板,有些位图则不需要(比如24位的真彩图就不需要);
//为什么需要调色板呢? //理由是:可以用调色板对颜色进行映射,从而压缩储存空间。 //正常情况下,24bit的位图每一个像素都有RGB三个通道,一共需要24bit //但是,一幅图里可能用不到那么多颜色,比如256级灰度图像。 //此时,只需要用4bit,就可以表示2^8种通过调色板定义的颜色。 typedef struct tagRGBQUAD{ BYTE rgbBlue; BYTE rgbGreen; BYTE rgbRed; BYTE rgbReserved; //不用管设为0即可 }RGBQUAD;
4、位图数据:这部分的内容根据BMP位图使用的位数不同而不同,在24位真彩图中,直接使用RGB,而其他的小于24位的则使用调色板中颜色的索引值。
typedef struct tagIMAGEDATA
{
BYTE blue;
BYTE green;
BYTE red;
}IMAGEDATA;
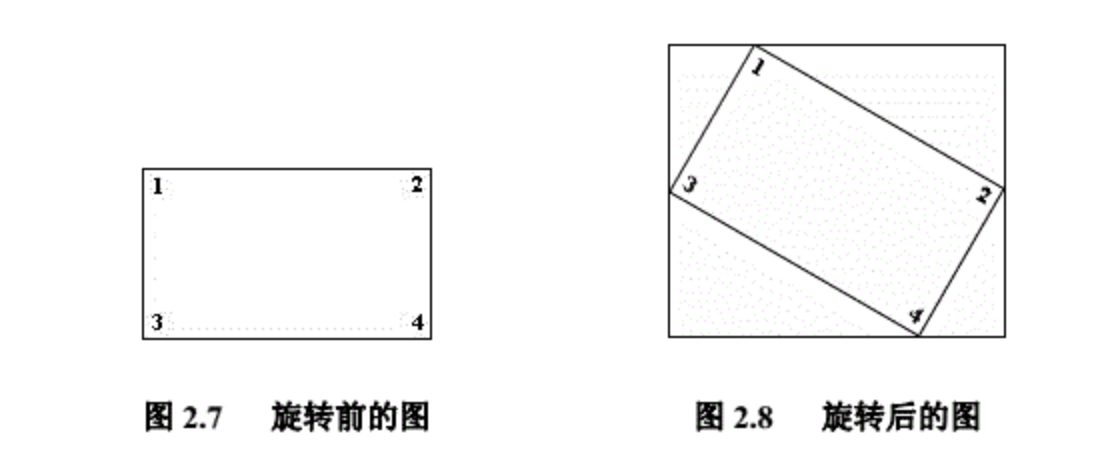
接下来我们需要了解的是,如何进行图像旋转。首先,最重要的是,我们要知道旋转之后,整个图片的大小其实是改变了的(以图片中心旋转的话)。图片来自《数字图像处理编程入门》。
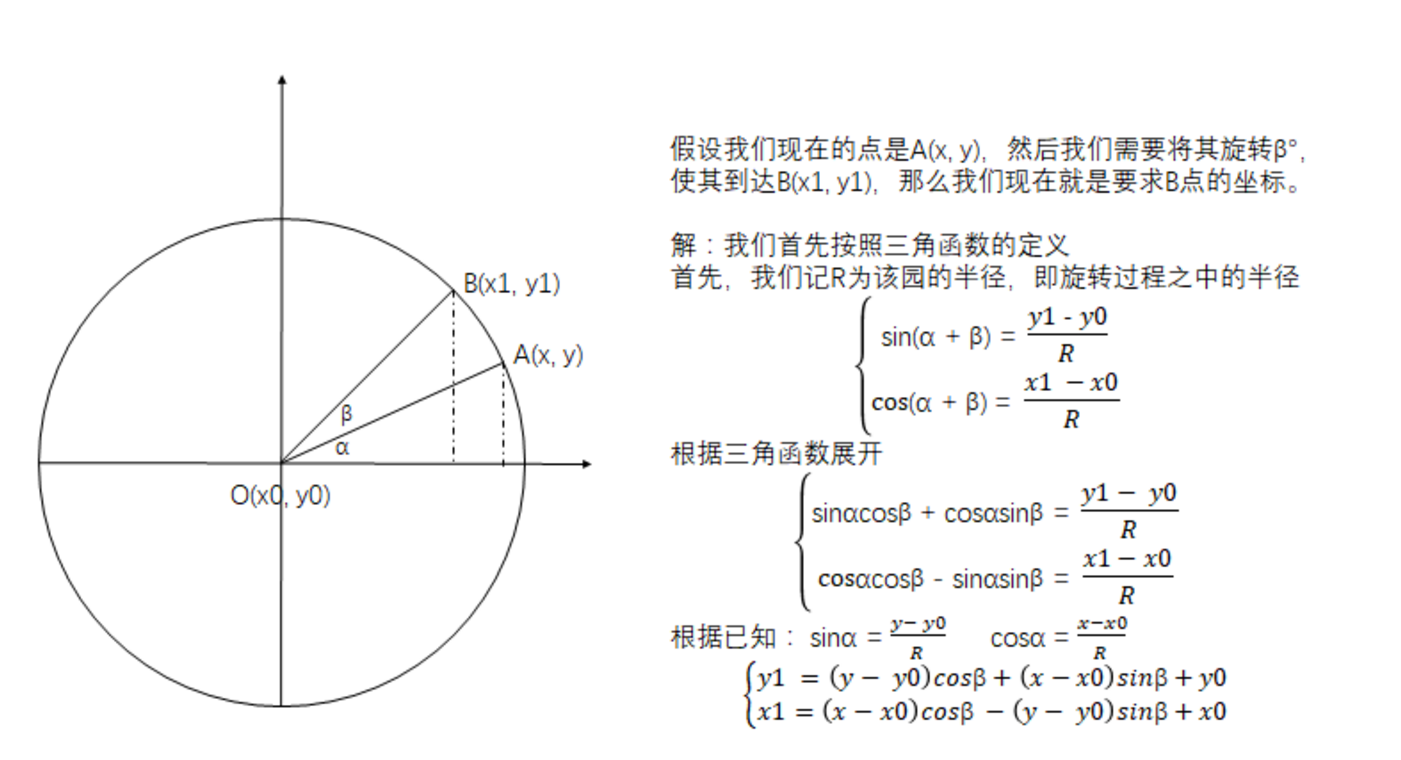
可以明显地看出,从原来的点到现在的点是一种线性变换,那么我们就可以用矩阵来表示这种运算,然后求逆运算就可以由(x1,y1)求出原来的坐标(x0,y0),这相当于把旋转后图上的像素,映射到原图的像素上,然后把原图该映射点的数据复制给新图该点,这样就完成了图片的旋转。
对于无法映射到原图的点,我们可以把它们的RGB值设为0,这样就会显示成黑色。
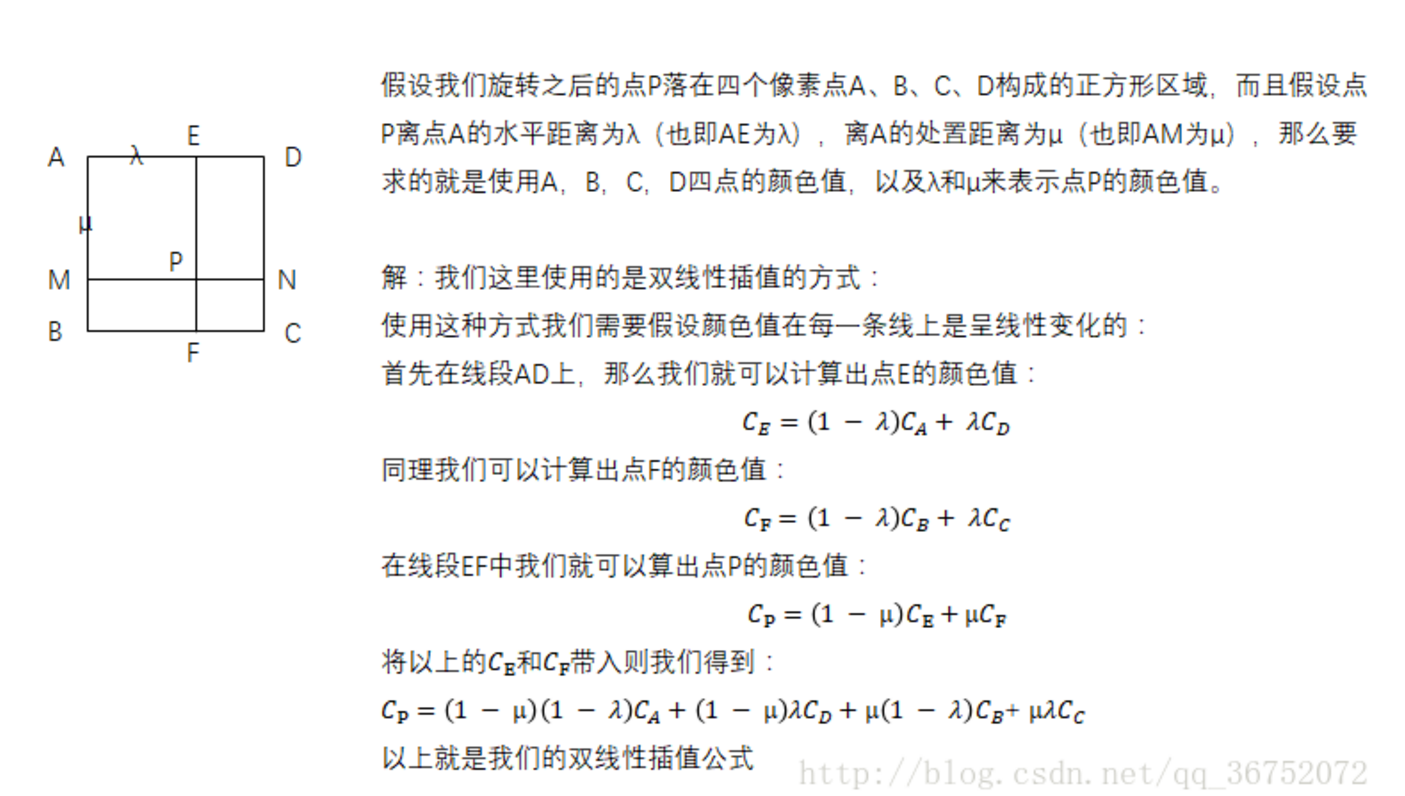
但是像素毕竟不是点,旋转之后会有误差,,如果旋转之后的像素点并不是很如人意的落在像素点上,而是落在临近的四个像素点构成的正方形区域内(而且这种情况应该是很常见的一种),我们使用双线性插值法来估计该点像素值。
代码部分:
/** *注意,由于包含了头文件<windows.h>,所以文件头和信息头还有调色板的定义都用不到 */
void rotateBMP(string path, string resPath, int angle) { //获取路径名 const char *picture_name=path.c_str(); const char *res_name=resPath.c_str(); //定义文件指针 FILE *file, *targetFile; //定义文件头和信息头 BITMAPFILEHEADER bmpFile, writeBmpFile; BITMAPINFOHEADER bmpInfo, writeBmpInfo; //角度转弧度 auto thelta=(double)(angle*PI/180); auto cosa=(float)cos((double)thelta); auto sina=(float)sin((double)thelta); file = fopen(picture_name, "rb"); targetFile=fopen(res_name,"wb"); fread(&bmpFile, sizeof(BITMAPFILEHEADER), 1, file); fseek(file, sizeof(BITMAPFILEHEADER), 0);//跳过位图文件头结构 fread(&bmpInfo, sizeof(BITMAPINFOHEADER), 1, file); // //fseek(file,sizeof(BITMAPINFOHEADER),0);//跳过信息头 this->ShowBMPHead(bmpFile); this->ShowBMPInfoHead(bmpInfo); /** step 1 : 图片处理第一步,首先是完成将文件头,信息头等的数据迁移 **/ writeBmpFile = bmpFile; writeBmpInfo = bmpInfo; int width = bmpInfo.biWidth; int height = bmpInfo.biHeight; cout<<width<<","<<height<<endl; //原图的四个角坐标 auto SrcX1=(float)(-0.5*width); auto SrcY1=(float)(0.5*height); auto SrcX2=(float)(0.5*width); auto SrcY2=(float)(0.5*height); auto SrcX3=(float)(-0.5*width); auto SrcY3=(float)(-0.5*height); auto SrcX4=(float)(0.5*width); auto SrcY4=(float)(-0.5*height); //新图的四个角坐标 float DstX1=cosa*SrcX1+sina*SrcY1; float DstY1=-sina*SrcX1+cosa*SrcY1; float DstX2=cosa*SrcX2+sina*SrcY2; float DstY2=-sina*SrcX2+cosa*SrcY2; float DstX3=cosa*SrcX3+sina*SrcY3; float DstY3=-sina*SrcX3+cosa*SrcY3; float DstX4=cosa*SrcX4+sina*SrcY4; float DstY4=-sina*SrcX4+cosa*SrcY4; //计算新图的宽度和高度 auto newWidth=(int)(max(fabs(DstX4-DstX1),fabs(DstX3-DstX2))+0.5); auto newHeight=(int)(max(fabs(DstY4-DstY1),fabs(DstY3-DstY2))+0.5); writeBmpInfo.biWidth = newWidth; writeBmpInfo.biHeight = newHeight; // 在计算实际占用的空间的时候我们需要将宽度为4byte的倍数 int writewidth = WIDTHBYTES(newWidth * writeBmpInfo.biBitCount); writeBmpInfo.biSizeImage = writewidth * writeBmpInfo.biHeight; writeBmpFile.bfSize = 54 + writeBmpInfo.biSizeImage; //把修改过的文件头和信息头写入目标文件 fwrite(&writeBmpFile, 1, sizeof(BITMAPFILEHEADER), targetFile); fwrite(&writeBmpInfo, 1, sizeof(BITMAPINFOHEADER), targetFile); //申请空间 if(bmpInfo.biBitCount==24)//如果是24位的BMP图 { int l_width=WIDTHBYTES(width * bmpInfo.biBitCount); BYTE *preData = (BYTE *)malloc(height * l_width); memset(preData, 0, height * l_width); BYTE *aftData = (BYTE *)malloc(newHeight * writewidth); memset(aftData, 0, newHeight * writewidth); //原来的旋转中心 int rotateX = width / 2; int rotateY = height / 2; //新图的中心 int write_rotateX = newWidth / 2; int write_rotateY = newHeight / 2; int OriginalImg = l_width * height; int LaterImg = writewidth * newHeight; fread(preData, 1, OriginalImg, file); for (int i = 0; i < newHeight; ++i) { for (int j = 0; j < newWidth; ++j) { int index = i * writewidth + j * 3; // 利用公式计算这个原来的点的地方 double y0 = (j - write_rotateX) * sina + (i - write_rotateY) * cosa + rotateY; double x0 = (j - write_rotateX) * cosa - (i - write_rotateY) * sina + rotateX; if((x0>=0)&&(x0<width)&&(y0>=0)&&(y0<=height)) { /** * 我们在这里使用双线性插值法来完成对应 */ int y0_True = y0; int x0_True = x0; double distance_to_a_X = x0 - x0_True; double distance_to_a_Y = y0 - y0_True; int original_point_A = y0_True * l_width + x0_True * 3; int original_point_B = y0_True * l_width + (x0_True + 1) * 3; int original_point_C = (y0_True + 1) * l_width + x0_True * 3; int original_point_D = (y0_True + 1) * l_width + (x0_True + 1) * 3; if (x0_True == width - 1) { original_point_A = original_point_B; original_point_C = original_point_D; } if (y0_True == height - 1) { original_point_C = original_point_A; original_point_D = original_point_B; } //相当于blue aftData[index] = (1 - distance_to_a_X) * (1 - distance_to_a_Y) * preData[original_point_A] + (1 - distance_to_a_X) * distance_to_a_Y * preData[original_point_B] + distance_to_a_X * (1 - distance_to_a_Y) * preData[original_point_C] + distance_to_a_X * distance_to_a_Y * preData[original_point_D]; //相当于green aftData[index + 1] = (1 - distance_to_a_X) * (1 - distance_to_a_Y) * preData[original_point_A + 1] + (1 - distance_to_a_X) * distance_to_a_Y * preData[original_point_B + 1] + distance_to_a_X * (1 - distance_to_a_Y) * preData[original_point_C + 1] + distance_to_a_X * distance_to_a_Y * preData[original_point_D + 1]; //相当于red aftData[index + 2] = (1 - distance_to_a_X) * (1 - distance_to_a_Y) * preData[original_point_A + 2] + (1 - distance_to_a_X) * distance_to_a_Y * preData[original_point_B + 2] + distance_to_a_X * (1 - distance_to_a_Y) * preData[original_point_C + 2] + distance_to_a_X * distance_to_a_Y * preData[original_point_D + 2]; } } } fwrite(aftData,1,LaterImg,targetFile); fclose(file); fclose(targetFile); delete [] preData; delete [] aftData; } else if(bmpInfo.biBitCount==8)//如果是8位的BMP图 { RGBQUAD strPla[256];//复制调色板 for (unsigned int nCounti = 0; nCounti < 256; nCounti++) { fread((char *)&(strPla[nCounti].rgbBlue), 1, sizeof(BYTE), file); fread((char *)&(strPla[nCounti].rgbGreen), 1, sizeof(BYTE), file); fread((char *)&(strPla[nCounti].rgbRed), 1, sizeof(BYTE), file); fread((char *)&(strPla[nCounti].rgbReserved), 1, sizeof(BYTE), file); } //写入调色板 for (int nCounti = 0; nCounti < 256; nCounti++) { fwrite((char *)&(strPla[nCounti].rgbBlue), 1, sizeof(BYTE), targetFile); fwrite((char *)&(strPla[nCounti].rgbGreen), 1, sizeof(BYTE), targetFile); fwrite((char *)&(strPla[nCounti].rgbRed), 1, sizeof(BYTE), targetFile); fwrite((char *)&(strPla[nCounti].rgbReserved), 1, sizeof(BYTE), targetFile); } int l_width=WIDTHBYTES(width * bmpInfo.biBitCount); BYTE *preData = (BYTE *)malloc(height * l_width); memset(preData, 0, height * l_width); BYTE *aftData = (BYTE *)malloc(newHeight * writewidth); memset(aftData, 0, newHeight * writewidth); //读取原图像素数据 fread(preData, sizeof(GRAYDATA)*width, height, file); //初始化新图的像素点 for (int i = 0; i < newHeight; ++i) { for (int j = 0; j < newWidth; ++j) { *(aftData+i*newWidth+j)=0; } } int rotateX = width / 2; int rotateY = height / 2; //新图的中心 int write_rotateX = newWidth / 2; int write_rotateY = newHeight / 2; int OriginalImg = l_width * height; int LaterImg = writewidth * newHeight; fread(preData, 1, OriginalImg, file); for (int i = 0; i < newHeight; ++i) { for (int j = 0; j < newWidth; ++j) { int index = i * writewidth + j ; // 利用公式计算这个原来的点的地方 double y0 = (j - write_rotateX) * sina + (i - write_rotateY) * cosa + rotateY; double x0 = (j - write_rotateX) * cosa - (i - write_rotateY) * sina + rotateX; if((x0>=0)&&(x0<width)&&(y0>=0)&&(y0<=height)) { /** * 我们在这里使用双线性插值法来完成对应 */ int y0_True = y0; int x0_True = x0; double distance_to_a_X = x0 - x0_True; double distance_to_a_Y = y0 - y0_True; int original_point_A = y0_True * l_width + x0_True ; int original_point_B = y0_True * l_width + (x0_True + 1) ; int original_point_C = (y0_True + 1) * l_width + x0_True ; int original_point_D = (y0_True + 1) * l_width + (x0_True + 1) ; if (x0_True == width - 1) { original_point_A = original_point_B; original_point_C = original_point_D; } if (y0_True == height - 1) { original_point_C = original_point_A; original_point_D = original_point_B; } //相当于blue aftData[index] = (1 - distance_to_a_X) * (1 - distance_to_a_Y) * preData[original_point_A] + (1 - distance_to_a_X) * distance_to_a_Y * preData[original_point_B] + distance_to_a_X * (1 - distance_to_a_Y) * preData[original_point_C] + distance_to_a_X * distance_to_a_Y * preData[original_point_D]; } } } fwrite(aftData,1,LaterImg,targetFile); fclose(file); fclose(targetFile); delete [] preData; delete [] aftData; } else { cout<<"错误的输入!!!!!!!!!!!!!"<<endl; } }
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!
 客服
客服


