
嵌入式软件(如航空电子和汽车系统)的设计、开发、测试和验证正变得越来越复杂。传统的文档驱动式环境中,一旦开发人员之间缺乏协调,软件程序生命周期的质量和成本就会受到严重影响,显然已经无法应对日益复杂的嵌入式软件生产。
正确使用基于模型的设计(Model-Based Design,以下简称MBD)方法可以有效规避此类问题:通过MBD提供的统一设计环境,开发人员可在软件的整个生命周期中使用同一套模型来进行需求验证、数据分析、模型可视化、测试和验证,并进行最终的产品部署(无论是否有自动代码生成)。
1.MBD是什么?
MBD是一种围绕嵌入式软件虚拟原型搭建展开的项目开发方法,其技术发展是为了克服应用于闭环控制系统(Closed-loop Control System)或DSP(Digital Signal Processing,数字信号处理)的嵌入式软件设计中常见的困难和复杂问题。
在大多数实际场景中,此类嵌入式软件的设计与测试需要在物理原型和系统可用之前就开始。由于整个项目开发过程往往需要多个团队的广泛参与,如果直至后期才发现设计和需求的错误,就会导致项目周期整体延迟、成本大大增加——使用MBD就是为了在项目早期阶段解决这些问题,以减少后期返工。
MBD还与仿真、图形化的生产能力模型相关联,能够对软件开发所涉及的每个阶段加强验证与确认过程。对嵌入式CPU(Central Processing Unit,中央处理器)或DSP上的代码进行验证是一个关键步骤,不仅能够检测算法设计转换至C代码过程中的缺陷,还能针对代码编译、二进制代码优化以及CPU/DSP体系结构的限制等问题采取先发制人的措施。
▲基于模型的设计(MBD)概述
2.基于模型的开发和测试
在使用MBD方法时,设计团队往往通过开发模型来分析和制定高层次的需求以及更为细致的底层需求。此类模型可具备解决方案的主要架构,但通常独立于嵌入式目标平台。模型所实现的主要需求能够在仿真过程中以精确的方式得到证明,并能说明可演绎的顶层需求,通常被指定为可执行的规范。
应用MBD的设计和测试团队之间共享模型组件和相关工作,有助于进一步确认嵌入式软件代码是否符合硬件的具体要求,并在较短时间内对代码进行更为集中的测试和Bug修正。
MBD的验证、确认、测试模型和软件的测试机制(任务)通常被分为下列四项:
模型在环(Model-in-Loop,MIL):验证算法模型是否满足功能需求;
软件在环(Software-in-Loop,SIL):验证【模型】与【模型代码实现】之间的一致性;
处理器在环(Processor-in-Loop,PIL):验证【模型】与【模型代码实现在目标处理器上运行】之间的一致性;
硬件在环(Hardware-in-Loop,HIL):在实际系统上验证代码与需求功能之间的一致性。
1. MIL - 模型在环测试
从集成层面来看,基于系统本身的模型尤为重要。在MIL层面测试嵌入式系统设计意味着模型及其环境在建模框架中进行仿真模拟,无需任何物理硬件组件的介入。这使得在开发周期的初始阶段进行测试成为可能,并能验证开发早期阶段的需求。代码验证的基准主要在于通过模拟收集到的信息。


▲ MIL测试
2. SIL - 软件在环测试
SIL层面,模型会根据嵌入式平台的最终目标进行进一步调整。控制器模型一般使用C或C++编写(可以是自动生成的代码),插入到仿真环境中与仿真的被控对象一起评估。
这种验证方式对于验证由自动生成代码和手写代码(代码需要集成并在嵌入式目标平台上执行)组成的软件组件尤其有用。SIL测试通常会重复使用MIL测试中的数据和模型结构,以检查仿真中的代码行为是否正确。通常,嵌入式软件和仿真环境模型在同一台机器上运行。

▲ SIL测试
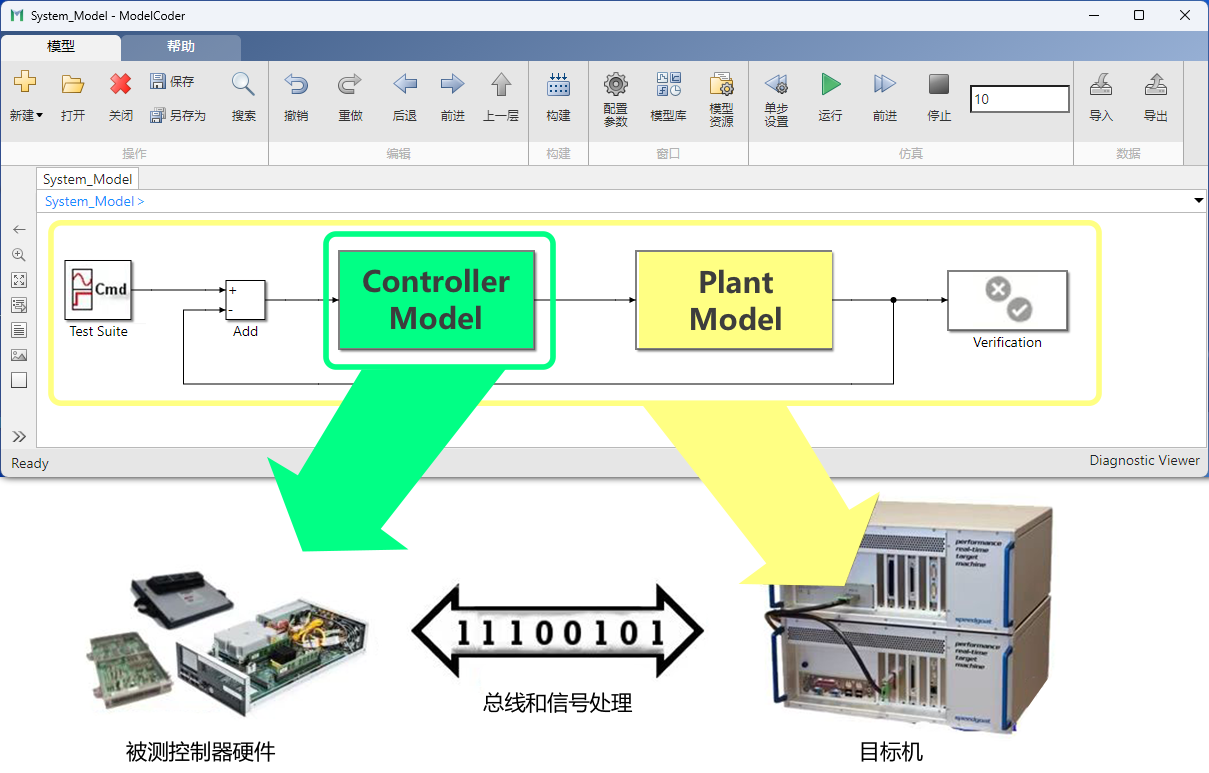
3. PIL - 处理器在环测试
PIL与MIL、SIL的不同之处在于其代码在目标微控制器或DSP上执行:将已编译的目标代码加载到目标处理器或DSP上,然后在被控对象模型上运行模拟以进行验证。PIL可执行大量V&V测试套件,以评估嵌入式CPU/DSP运行控制器算法的能力。如果SIL和PIL结果之间存在差异,可对PIL目标代码针对定点精度、内存占用或编译器优化标志等部分进行微调。

▲PIL测试
PIL可以弥补仿真软件中执行的控制器模型设计和在目标机上执行的实际控制器代码之间的差距,不仅能够识别出可能源自编译器的错误,还支持调试算法功能和评估嵌入式微控制器或DSP的性能,并可提供软件系统的重要测量数据,如内存使用和执行时间。这些数据可用来在仿真环境中微调控制器功能,并应用于嵌入式硬件设计的早期阶段。
▲PIL实际应用
4. HIL - 硬件在环测试
PIL测试结束后的下一步动作,通常会使用实际系统(或实验室原型)或运行被控对象模型的实时模拟器来替换被控对象模型。例如,如果工程师正在设计直流电机速度控制器,那么控制器代码将部署在微控制器或DSP板上,然后通过IO(输入输出)接口连接到真正的直流电动机。
由于HIL测试允许在实时环境中以可管理的方式调试和评估功能测试/运行测试,因此实现可靠的HIL测试通常需要用到大量的自动化测试、日志以及硬件的接口组件。相对而言,PIL的设置相对容易,需要的硬件和软件资源也会更少。
▲ HIL测试
四个测试手段的对比如下:
SkyEye,中文全称天目全数字实时仿真软件,是基于可视化建模的硬件行为级仿真平台,支持用户通过拖拽的方式对硬件进行行为级别的仿真和建模。SkyEye采用“面向对象”的设计思想,将虚拟目标系统上的所有组件都设计为独立的模块,支持通过手动修改和界面图形拖拽的方式快速生成虚拟目标系统的“硬件配置文件”,从而快速构建虚拟目标系统,达到加载和运行二进制目标程序并进行仿真测试的目的。
SkyEye目前支持仿真的处理器架构有:ARM、DSP、POWERPC、SPARC、X86、MIPS、MCS-51、TriCore等,可支持SIL和PIL仿真测试,对嵌入式实时软件开发极具价值。
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!
 客服
客服


