一.前言
从上个世纪到现在,工程师们在优化服务器性能的过程中,提出了各种不同的io模型,比如非阻塞io,io复用,信号驱动式io,异步io。具体io模型在不同平台上的实现也不一样,比如io复用在bsd上可以由kqueue实现,在solaris系统上可以由/dev/poll实现。为了实现系统的可移植性,POSIX 确保 select和poll在 unix-like系统上得到广泛的支持。
在上个世纪,Dan Kegel 提出了C10K的设想,现在C10K 已经不是什么问题,比如nginx就可以做到百万级别的qps。于是又有人提出来了C10M的设想,Robert David Graham 从unix的最初设计初衷给出了自己的解决方案。
二.常见io模型
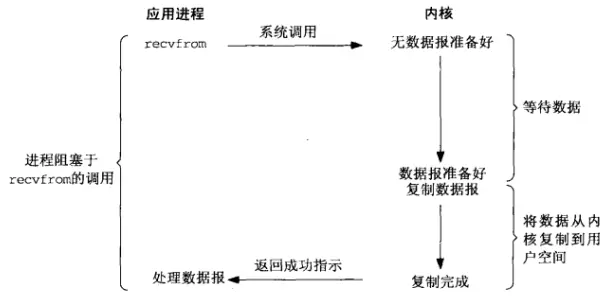
1.阻塞io
常见的read系统调用,是最常见的阻塞io:
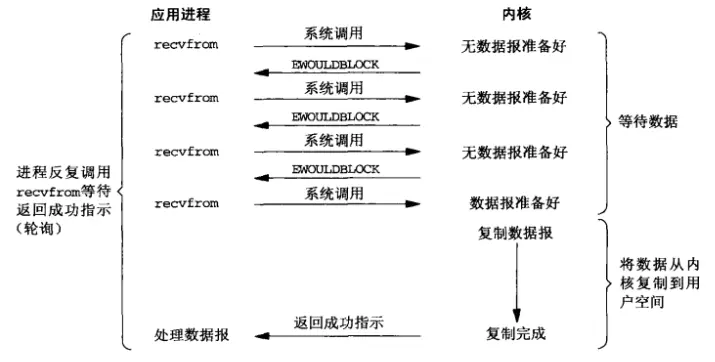
2.非阻塞式io
非阻塞io的典型使用方式如下,设置非阻塞标志,并且常与io复用一起使用,使用起来比较复杂。
val = Fcntl(sockfd, F_GETFL, 0);
Fcntl(sockfd, F_SETFL, val | O_NONBLOCK); /* O_NONBLOCK 标志非阻塞 */
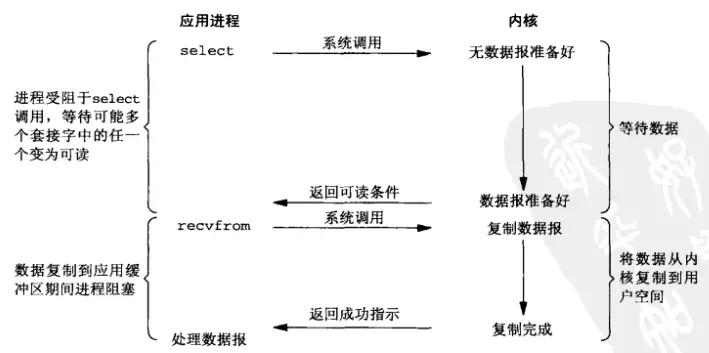
3.io 复用 (select/poll)
io复用在处理数量庞大的fd时非常有效,我们以select为例,select的核心api是select函数:
int select(int nfds, fd_set *_Nullable restrict readfds,
fd_set *_Nullable restrict writefds,
fd_set *_Nullable restrict exceptfds,
struct timeval *_Nullable restrict timeout);看一个例子:
#include "unp.h"
void
str_cli(FILE *fp, int sockfd)
{
int maxfdp1;
fd_set rset;
char sendline[MAXLINE], recvline[MAXLINE];
FD_ZERO(&rset);
for ( ; ; ) {
FD_SET(fileno(fp), &rset); /* 设置要监听的socket fd */
FD_SET(sockfd, &rset); /* 设置要监听的file fd */
maxfdp1 = max(fileno(fp), sockfd) + 1;
Select(maxfdp1, &rset, NULL, NULL, NULL); /* select 调用 */
if (FD_ISSET(sockfd, &rset)) { /* socket 可读 */
if (Readline(sockfd, recvline, MAXLINE) == 0)
err_quit("str_cli: server terminated prematurely");
Fputs(recvline, stdout);
}
if (FD_ISSET(fileno(fp), &rset)) { /* input 可读 */
if (Fgets(sendline, MAXLINE, fp) == NULL)
return; /* all done */
Writen(sockfd, sendline, strlen(sendline));
}
}
}
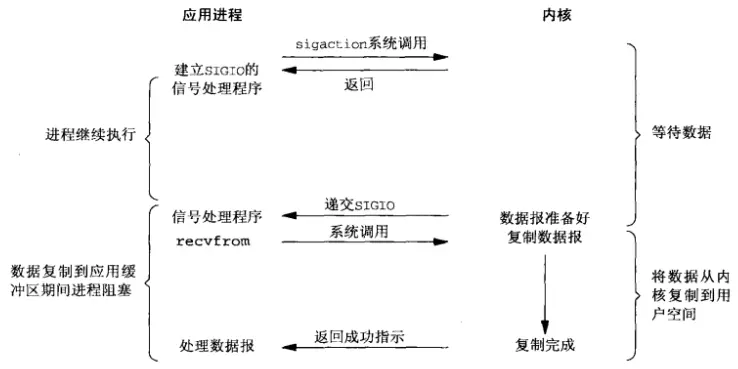
4.信号驱动式io
但凡涉及到信号的程序都比较复杂。要使用信号驱动式io,先开启socket的信号驱动式io功能,并通过sigaction 系统调用安装一个信号处理函数:
void
dg_echo(int sockfd_arg, SA *pcliaddr, socklen_t clilen_arg)
{
int i;
const int on = 1;
sigset_t zeromask, newmask, oldmask;
sockfd = sockfd_arg;
clilen = clilen_arg;
for (i = 0; i < QSIZE; i++) { /* init queue of buffers */
dg[i].dg_data = Malloc(MAXDG);
dg[i].dg_sa = Malloc(clilen);
dg[i].dg_salen = clilen;
}
iget = iput = nqueue = 0;
Signal(SIGHUP, sig_hup); /* 安装信号处理函数 */
Signal(SIGIO, sig_io);
Fcntl(sockfd, F_SETOWN, getpid()); /* 设置属主 */
Ioctl(sockfd, FIOASYNC, &on); /* 开启信号驱动式io */
Ioctl(sockfd, FIONBIO, &on); /* non-bloking */
Sigemptyset(&zeromask); /* init three signal sets */
Sigemptyset(&oldmask);
Sigemptyset(&newmask);
Sigaddset(&newmask, SIGIO); /* signal we want to block */
Sigprocmask(SIG_BLOCK, &newmask, &oldmask);
for ( ; ; ) {
while (nqueue == 0)
sigsuspend(&zeromask); /* wait for datagram to process */
/* 4unblock SIGIO */
Sigprocmask(SIG_SETMASK, &oldmask, NULL);
Sendto(sockfd, dg[iget].dg_data, dg[iget].dg_len, 0,
dg[iget].dg_sa, dg[iget].dg_salen);
if (++iget >= QSIZE)
iget = 0;
/* 4block SIGIO */
Sigprocmask(SIG_BLOCK, &newmask, &oldmask);
nqueue--;
}
}
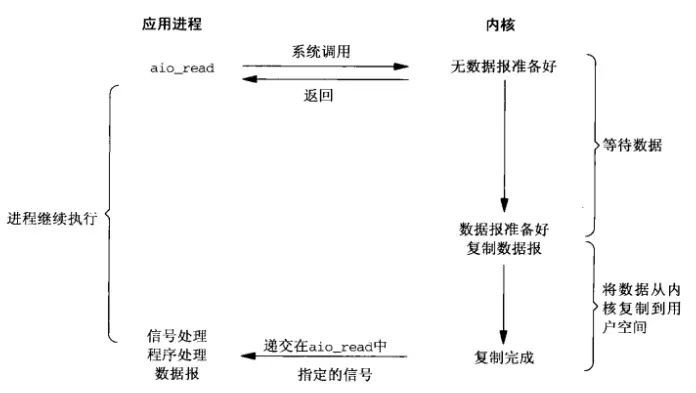
5.异步io
我们来看一个aio的例子(由于aio的例子过于复杂,我们这里只截取部分关键代码):
for (i = 0; i < NBUF; i++) {
switch (bufs[i].op) {
case UNUSED:
/*
* Read from the input file if more data
* remains unread.
*/
if (off < sbuf.st_size) {
bufs[i].op = READ_PENDING;
bufs[i].aiocb.aio_fildes = ifd;
bufs[i].aiocb.aio_offset = off;
off += BSZ;
if (off >= sbuf.st_size)
bufs[i].last = 1;
bufs[i].aiocb.aio_nbytes = BSZ;
if (aio_read(&bufs[i].aiocb) < 0) /* aio_read */
err_sys("aio_read failed");
aiolist[i] = &bufs[i].aiocb;
numop++;
}
break;
case READ_PENDING:
if ((err = aio_error(&bufs[i].aiocb)) == EINPROGRESS) /* aio_error */
continue;
if (err != 0) {
if (err == -1)
err_sys("aio_error failed");
else
err_exit(err, "read failed");
}
/*
* A read is complete; translate the buffer
* and write it.
*/
if ((n = aio_return(&bufs[i].aiocb)) < 0) /* 调用aio_return成功则 说明数据已经返回 */
err_sys("aio_return failed");
if (n != BSZ && !bufs[i].last)
err_quit("short read (%d/%d)", n, BSZ);
for (j = 0; j < n; j++)
bufs[i].data[j] = translate(bufs[i].data[j]);
bufs[i].op = WRITE_PENDING;
bufs[i].aiocb.aio_fildes = ofd;
bufs[i].aiocb.aio_nbytes = n;
if (aio_write(&bufs[i].aiocb) < 0) /* aio_write */
err_sys("aio_write failed");
/* retain our spot in aiolist */
break;
case WRITE_PENDING:
if ((err = aio_error(&bufs[i].aiocb)) == EINPROGRESS) /* aio_error */
continue;
if (err != 0) {
if (err == -1)
err_sys("aio_error failed");
else
err_exit(err, "write failed");
}
/*
* A write is complete; mark the buffer as unused.
*/
if ((n = aio_return(&bufs[i].aiocb)) < 0)
err_sys("aio_return failed");
if (n != bufs[i].aiocb.aio_nbytes)
err_quit("short write (%d/%d)", n, BSZ);
aiolist[i] = NULL;
bufs[i].op = UNUSED;
numop--;
break;
}
}
6.同步和异步的分类
网络上对io同步和异步的争论很多,这里给出Stevens的分类标准:
| 同步 | 阻塞io,非阻塞io,io复用,信号驱动式io |
| 异步 | 异步io |
三.C10K io策略
在上个世纪,Dan Kegel 提出了C10K的设想,即单机实现10k的并发量,主要提出了以下四种类型的解决方法:
| 服务器范式 | 例子 | 备注 | 软件实现 |
| Serve many clients with each thread, and use nonblocking I/O(level-triggered) | select, poll(posix), /dev/poll(solaris), kqueue(bsd) | 轮询 | |
| Serve many clients with each thread, and use nonblocking I/O (readiness change) | kqueue(bsd), epoll(linux), Realtime Signals(linux) | 事件通知 | nginx, redis |
| Serve many clients with each server thread, and use asynchronous I/O | aio | 异步,没有得到广泛支持 | |
| Serve one client with each server thread |
LinuxThreads, Java threading support in JDK 1.3.x and earlier |
早期的java使用绿色线程 |
- 在实现的过程中有诸多限制,比如打开fd的限制,创建thread数量的限制,根据不同内核而异。
- 32 位系统,用户态的虚拟空间只有3G,如果创建线程时分配的栈空间是10M,那么一个进程最多只能创建300 个左右的线程。 64 位系统,用户态的虚拟空间大到有128T,理论上不会受虚拟内存大小的限制(10M个线程),而会受系统的参数或性能限制(线程上下文切换)。
四.C10M
Robert David Graham认为如果要解决C10M的问题,必须对unix内核进行改造。当下的unix系统的设计目标是为了满足非常广泛的需求,于是加上了许多通用的功能,比如进程管理,内存管理等等。C10M的问题不是通用的问题,需要自己处理数据控制,而不是依赖unix内核,而且需要做到packet scalability, multi-core scalability, memory scalability。
专项问题,需要特殊的解决方案。
五.总结
本文从常见io模型出发,梳理了高并发服务器可能涉及到的io模型,这些经典io模型在过去十年基本没有发生变化。了解这些底层技术对我们了解深入理解服务器是非常有必要的。
六.参考
http://www.kegel.com/c10k.html#threads.java
http://highscalability.com/blog/2013/5/13/the-secret-to-10-million-concurrent-connections-the-kernel-i.html
https://man7.org/linux/man-pages/man2/select.2.html
文章来源: 博客园
- 还没有人评论,欢迎说说您的想法!


 客服
客服


